- 1JavaScript学习(基础)_课程 javascript基础
- 2Ubuntu22.04.01Desktop桌面版安装记录221109_hwclock: use the --verbose option to see the detai
- 3python怎样给对象赋值_python 对象/变量&赋值的几点思考
- 4如何升级到 Docker Compose v2_docker-compose 版本过低,请升级至v2+!
- 5python 数字人视频生成_python的数字人面部表情视频
- 6The authentication type 10 is not supported_the authentication type 10 is not supported. check
- 7分布式消息通知----Kafka集群部署_kafka分布式部署
- 8unity配置.asset文件_unity .asset
- 9使用QT实现点餐ui界面_qt点餐系统
- 10pyqt5界面的布局与资源文件的载入_pyqt5布局文件
项目——STM32小车项目_stm32码垛小车例程
赞
踩
一、设计内容
1、 已有材料:STM32小车相关硬件
2、 开发工具:Keil uVision5
3、 资料:相关硬件说明书、指导老师提供的部分基础工程代码及教学视频
4、 实现功能:小车基本动作控制驱动、小车调速控制、蓝牙实现小车遥控、小车的自动避障(超声波+红外线)、小车的循迹功能
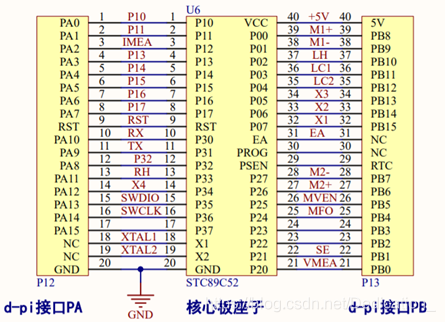
二、芯片引脚介绍
三、开发环境配置
1) 安装MDK——keil5.28
① 下载md528a.exe
② Customer information全部空格 安装
③ 安装Keil.STM32F1xx_DFP.1.0.5.pack直接next
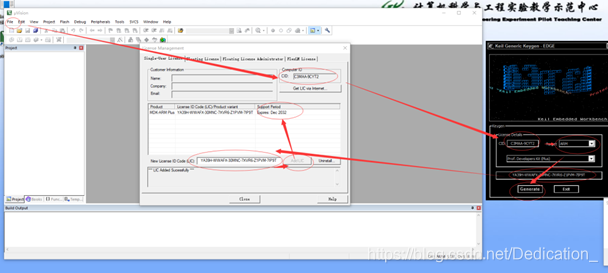
④ 解压keygen_new2032.rar 管理员身份运行 破解keil5
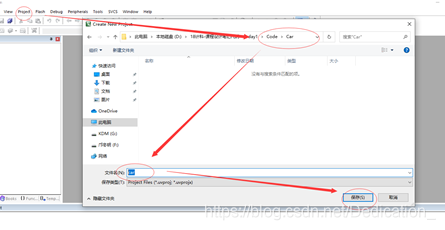
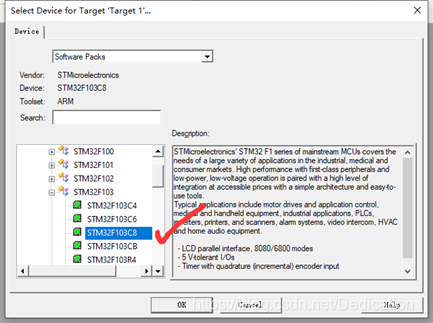
2) 新建STM32F103工程
① 选择工程路径和命名
② 芯片型号选择
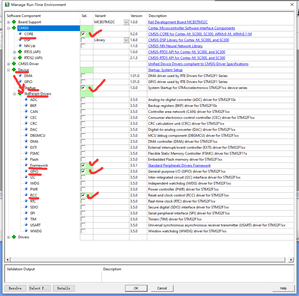
③ 函数库选择
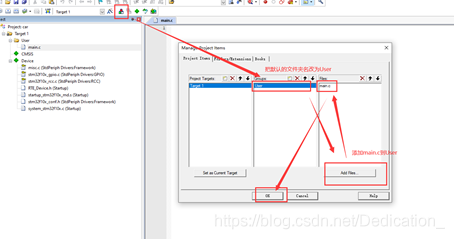
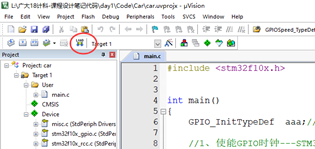
④ 创建一个.c文件 保存为main.c 加入keil中
⑤ 编译
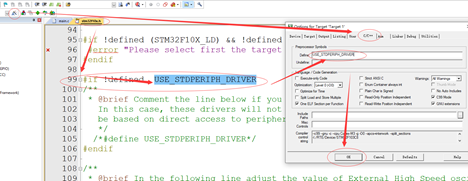
⑥ 出错解决
3) 将程序下载进小车
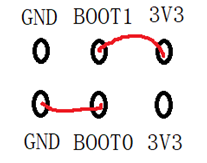
① 跳线帽接好,芯片对应的USB线连接电脑
② 下载程序
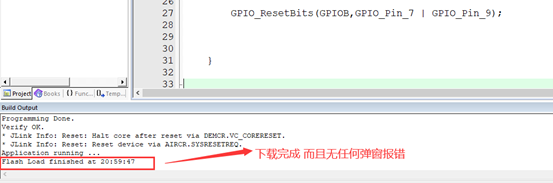
③ 成功标志
三、小车基本动作控制驱动
1、原理分析
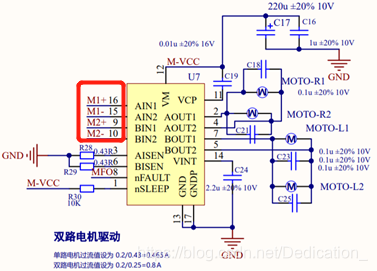
- 双路电机驱动对应的接口为
M1+ M1- M2+ M2- - 通过上面的
芯片引脚端口图,找到对应的芯片引脚为GPIOB组的Pin_6 Pin7 Pin8 Pin9 - 可以看到M1+ M1-是控制同条电路,而M2+ M2-是控制另外一条电路
- 也就是说,
小车左边前后轮为一组控制,小车右边前后轮为一组控制 - M1+对应的是右前轮,M1-对应的是右后轮,而M2则为左边
- 当M1+与M1-输出相同电平,都无法唯一确定电流的去向,表现为右轮不动
- 当M1+与M1-输出相反电平,
若M1+ M1-为10,则右边前进,而01则为右边后退
2、代码编写步骤
- 开启使能时钟
- GPIO结构体初始化
端口配置->速度配置->模式选择 - 引脚高低电平设置
GPIO_SetBits() GPIO_ResetBits()
3、 实现代码
(电机初始化)
void Motor_Init(void){
//1、使能GPIO时钟---STM32芯片编程模块必须先做这一步
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//2、GPIO的结构体初始化
GPIO_InitTypeDef aaa;//定义一个用来初始化GPIO的结构体
aaa.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6| GPIO_Pin_7| GPIO_Pin_8 | GPIO_Pin_9;//PB6 PB7 PB8 PB9对应电机四个轮 PB5对应使能电池
aaa.GPIO_Speed = GPIO_Speed_50MHz;
aaa.GPIO_Mode = GPIO_Mode_Out_PP;//普通推挽输出
GPIO_Init(GPIOB,&aaa);//调用官方的初始化函数 完成对PB组引脚初始化
//3、PB5 = 1,使能电池供电
GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
(小车基础动作)
//小车前进函数 void Car_Forward() { //PB6 = 1 PB8 =1 GPIO_SetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_8); //PB7 = 0 PB9 = 0 GPIO_ResetBits(GPIOB,GPIO_Pin_7 | GPIO_Pin_9); } //小车后退函数 void Car_Back() { //PB7 = 1 PB9 = 1 GPIO_SetBits(GPIOB,GPIO_Pin_7 | GPIO_Pin_9); //PB6 = 0 PB8 = 0 GPIO_ResetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_8); } //小车停止函数 void Car_Stop() { //PB6 = 1 PB7 = 1 GPIO_ResetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7); //PB8 = 0 PB9 = 0 GPIO_ResetBits(GPIOB,GPIO_Pin_8 | GPIO_Pin_9); } //小车前左转函数 void Car_Left() { //PB6 = 1 PB7 = 1 PB8 = 1 GPIO_SetBits(GPIOB,GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8); //PB9 = 0 GPIO_ResetBits(GPIOB,GPIO_Pin_9); } //小车前右转函数 void Car_Right() { //PB8 = 1 PB9 = 1 PB6 = 1 GPIO_SetBits(GPIOB,GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_6); //PB7=0 GPIO_ResetBits(GPIOB,GPIO_Pin_7); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
四、小车调速控制
1、原理分析
使用计数器,控制高电平在总时间的比例,实现小车的速度控制。
例如
在20us时间里,高电平输出时间为10us,实现小车半速前行;
在20us时间里,高电平输出时间为5us,实现小车1/4速度前行;
- 1
- 2
- 3
- 4
2、代码编写步骤
- 开启GPIOB、AFIO、TIM4的使能时钟
- 初始化GPIO
- 初始化基本定时器
- 利用定时器实现对应通道的电平输出控制
- 开启定时器
3、实现代码
(电机初始化)
void Motor_Init(void){ //1、开始使能时钟---STM32芯片编程模块必须先做这一步 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//电机调速添加 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//电机调速添加 //2、GPIO结构初始化 将对应端口设置作复用功能 GPIO_InitTypeDef aaa;//定义一个用来初始化GPIO的结构体 aaa.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 |GPIO_Pin_8 | GPIO_Pin_9;// aaa.GPIO_Speed = GPIO_Speed_50MHz; aaa.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出 GPIO_Init(GPIOB,&aaa);//调用官方的初始化函数 完成对PB组引脚初始化 //3、基本定时器TIM4初始化(分频系数 计数模式 自动重装载值 分频因子) TIM_TimeBaseInitTypeDef ccc; ccc.TIM_Prescaler = 72-1;//72Mhz/72 = 1Mhz 1个脉冲对应1us ccc.TIM_CounterMode = TIM_CounterMode_Up;//递增计数模式 ccc.TIM_Period = 2000-1;//ARR 2000 自动重装载值 刚好周期为2ms ccc.TIM_ClockDivision = TIM_CKD_DIV1;//上面的预分频系数够了 这里设置为1分频即不分频 TIM_TimeBaseInit(TIM4,&ccc); //4、定时器TIM4输出通道1 2 3 4的初始化 TIM_OCInitTypeDef ddd; ddd.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式1---递增模式下 CNT<CCR时输出有效电平 CNT>CCR时输出另一种电平 ddd.TIM_OCPolarity = TIM_OCPolarity_High;//极性高----高电平有效 配合上面的模式,即左边输出高 右边输出低 ddd.TIM_Pulse = 0;// 比较值 0就是默认都只输出100%低电平 ddd.TIM_OutputState = TIM_OutputState_Enable; TIM_OC1Init(TIM4,&ddd);//注意这里是OC1---对应通道1 TIM_OC2Init(TIM4,&ddd);//注意这里是OC2---对应通道2 TIM_OC3Init(TIM4,&ddd);//注意这里是OC3---对应通道3 TIM_OC4Init(TIM4,&ddd);//注意这里是OC4---对应通道4 //5、开启定时器4计数器--开始工作计数 TIM_Cmd(TIM4,ENABLE); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
(小车基础动作的调速->通过一个函数实现小车的五种基础动作)
//speed->[0,1999]
void Car_Speed_Init(int Speed1,int Speed2,int Speed3,int Speed4){
TIM4->CCR1 = Speed1;
TIM4->CCR2 = Speed2;
TIM4->CCR3 = Speed3;
TIM4->CCR4 = Speed4;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
(例子说明)
| CCR1 | CCR2 | CCR3 | CCR4 | 功能 |
|---|---|---|---|---|
| 1500 | 0 | 1500 | 0 | 前进 |
| 0 | 1600 | 0 | 1600 | 后退 |
| 1000 | 0 | 1200 | 0 | 差速左转 |
| 1400 | 0 | 1000 | 0 | 差速右转 |
五、蓝牙遥控小车
1、原理分析
蓝牙 与芯片 与手机连接示意图:
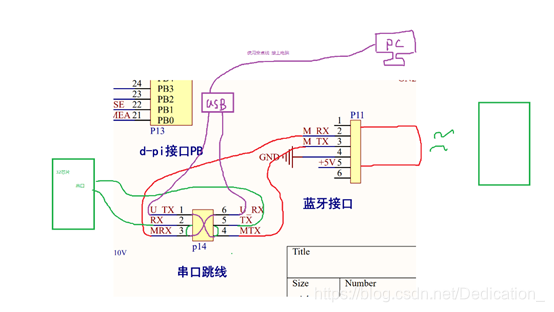
AT指令模式:蓝牙->芯片 默认波特率38400
透穿模式:蓝牙->手机 默认波特率9600
2、蓝牙连接电脑
- 按照小车底板的排座接口接好蓝牙
- 将板子的USB直连 同时用USB线连到电脑 即蓝牙直接和电脑相连
- 电脑端运行串口助手软件 开始使用AT指令调试蓝牙

- 运行XCOM串口助手 连接上蓝牙
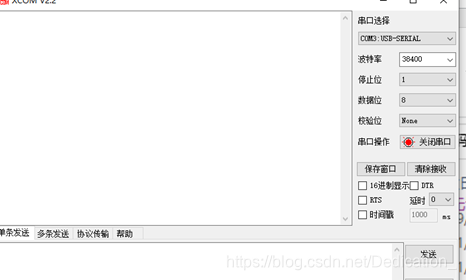
- 拔下蓝牙 按住蓝牙上的小按键 不松开再插回去 蓝牙慢闪
- 通过发送文本框输入
a) AT回车 蓝牙会反馈OK
b) AT+NAME? 回车 蓝牙会反馈自己的名称
c) AT+NAME=你设置的新蓝牙名字 回车 设置新的蓝牙名称
d) AT+UART? 回车 查询蓝牙透传模式下的通信波特率
e) AT+UART=9600,0,0 回车 设置蓝牙波特率为9600 停止位1 无校验位
- 1
- 2
- 3
- 4
- 5
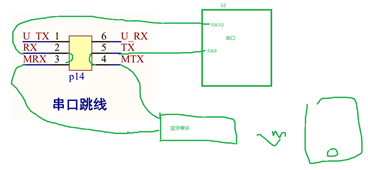
3、蓝牙连接手机
- 跳线帽短接STM32和蓝牙
- 下载<蓝牙串口>app
- 输入<1234>实现手机与蓝牙的连接
4、蓝牙遥控小车
代码编写步骤
- 开启使能 GPIOA USART1 AFIO 时钟
- 配置USART1
USART_Init() - 配置GPIOA的 PA9 PA10——对应蓝牙端口的引脚
- 开启串口接收中断
USART_ITConfig() - 开启串口
USART_Cmd()
实现代码
void UART1_Init(void) { //1、使能 GPIOA USART1 AFIO 时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //2、配置串口1 USART_InitTypeDef aaa; aaa.USART_BaudRate = 9600;// 和蓝牙一致的波特率 aaa.USART_WordLength = USART_WordLength_8b;//有效数据长度8bit aaa.USART_StopBits = USART_StopBits_1;//1bit停止位 aaa.USART_Parity = USART_Parity_No;//不要校验位 aaa.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//收发模式 aaa.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不需要硬件流控 USART_Init(USART1,&aaa); //3、初始化GPIOA结构体 配置蓝牙对应的引脚 GPIO_InitTypeDef bbb; bbb.GPIO_Pin = GPIO_Pin_9;//TX bbb.GPIO_Speed = GPIO_Speed_50MHz; bbb.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出 GPIO_Init(GPIOA,&bbb); bbb.GPIO_Pin = GPIO_Pin_10;//RX bbb.GPIO_Speed = GPIO_Speed_50MHz; bbb.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入模式 GPIO_Init(GPIOA,&bbb); //3、配置USART1的中断优先级 NVIC_InitTypeDef ccc;//定义一个用来初始化中断优先级的结构体 ccc.NVIC_IRQChannel = USART1_IRQn;//USART1全局中断号,类似大家的身份证号 让芯片知道是哪个中断 ccc.NVIC_IRQChannelPreemptionPriority = 0x01;//第一优先级数值 0x00~0x0F 数字越小 优先级越高 ccc.NVIC_IRQChannelSubPriority = 0x01;//第二优先级数值 0x00~0x0F 数字越小 优先级越高 ccc.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&ccc); //4、开启串口接收中断 串口1有数据过来就会跳转到中断函数运行代码 USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //5、开启串口 USART_Cmd(USART1,ENABLE); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
//处理串口1的中断函数 void USART1_IRQHandler(void) { char RData=0;//定义一个用来临时存放串口接收数据的变量 //先读取并判断串口的接收数据中断标志位有没有触发 if(USART_GetITStatus(USART1,USART_IT_RXNE)==1) { USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清除串口1的接收中断标志位 RData = USART1->DR;//接收串口1的一个字节数据 这个函数是库函数 //接收完成再判断该变量 手机发过来不同的数字 小车有不同的动作 if(RData == '0') Car_Stop();//小车停止 else if(RData == '1') Car_Forward();//小车前进 else if(RData == '2') Car_Back();//小车后退 else if(RData == '3') Car_Left();//小车前左转 else if(RData == '4') Car_Right();//小车前右转 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
六、小车超声波避障
1、舵机转向位置控制
- 原理
利用计时器,根据不同的值给予不同时间的高电平,使其转动不同的方向。
1、该舵机要求提供的PWM周期为20ms
2、舵机控制角度为0~180° 0.5ms~2.5ms的高电平周期对应的转动角度是0~180°
3、调整其20ms pwm周期内的高电平比例可控制其输出角度
- 1
- 2
- 3
- 4
- 代码步骤
1.使能时钟 GPIOB1 AFIO TIM3
2.GPIO PB1初始化
3.基本定时器TIM3初始化(分频系数 计数模式 自动重装载值 分频因子)
4.定时器TIM3输出通道4的初始化
5.开启定时器3计数器--开始工作计数
- 1
- 2
- 3
- 4
- 5
- 代码实现
(舵机初始化)
void steeringEngine_Init(void) { //1、使能时钟 GPIOB1 AFIO TIM3 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //2、GPIO PB1初始化 GPIO_InitTypeDef bbb; bbb.GPIO_Pin = GPIO_Pin_1;//TX bbb.GPIO_Speed = GPIO_Speed_50MHz; bbb.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出 GPIO_Init(GPIOB,&bbb); //3、基本定时器TIM3初始化(分频系数 计数模式 自动重装载值 分频因子) TIM_TimeBaseInitTypeDef ccc; ccc.TIM_Prescaler = 72-1;//72Mhz/72 = 1Mhz 1个脉冲对应1us ccc.TIM_CounterMode = TIM_CounterMode_Up;//递增计数模式 ccc.TIM_Period = 20000-1;//ARR 20000 自动重装载值 刚好周期为20ms ccc.TIM_ClockDivision = TIM_CKD_DIV1;//上面的预分频系数够了 这里设置为1分频即不分频 TIM_TimeBaseInit(TIM3,&ccc); //4、定时器TIM3输出通道4的初始化 TIM_OCInitTypeDef ddd; ddd.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式1---递增模式下 CNT<CCR时输出有效电平 CNT>CCR时输出另一种电平 ddd.TIM_OCPolarity = TIM_OCPolarity_High;//极性高----高电平有效 配合上面的模式,即左边输出高 右边输出低 ddd.TIM_Pulse = 500;// 比较值 CCR500*1us = 500us = 0.5ms高电平 默认舵机转到0°位置 ddd.TIM_OutputState = TIM_OutputState_Enable; TIM_OC4Init(TIM3,&ddd);//注意这里是OC4---对应通道4 //5、开启定时器3计数器--开始工作计数 TIM_Cmd(TIM3,ENABLE); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
(舵机位置赋值)
TIM3->CCR4 = 500;//0*
TIM3->CCR4 = 1000;//45*
TIM3->CCR4 = 1500;//90*
TIM3->CCR4 = 2000;//135*
TIM3->CCR4 = 2500;//180*
- 1
- 2
- 3
- 4
- 5
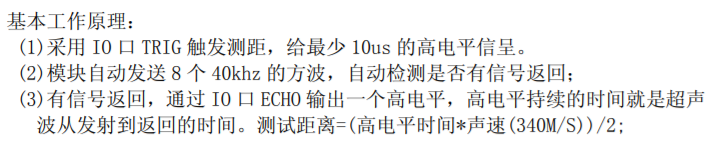
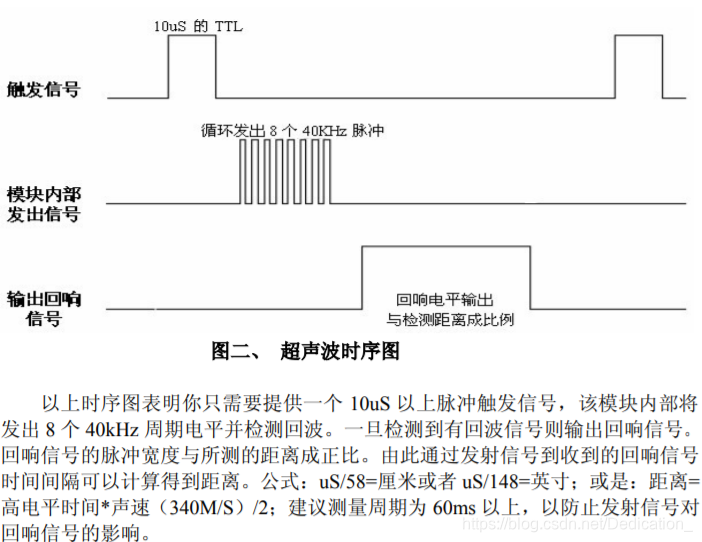
2、超声波模块驱动与测距
- 原理分析
- 代码步骤
//超声波模块初始化 1.启动使能时钟 GPIOB GPIOA TIM2 2.特定的引脚初始化——PB11 PB12 3.定时器初始化——TIM2 4.先关闭定时器 //超声波测距 1.先控制TRIG引脚输出一个至少10us高电平 启动超声波模块 2.等待ECHO引脚被超声波模块自己拉高 在拉高的瞬间我们开始计时即可 3.高电平开始计时 4.跳出来时 count是多少就代表高电平持续了多少us //超声波避障 while(1){ 1.小车距离障碍物大于30 前进 2.小车距离障碍物小于30 停止 3.当小车距离障碍物小于40 一边后退一边查找方向 } //查找方向 1.右转45? 2.右转90? 3.左转45? 4.左转90? 5.继续后退
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 代码实现
(超声波模块初始化)
void HCSR_Init(void) { //1、使能时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); //2、配置PB11--TRIG 为输出模式 GPIO_InitTypeDef aaa;//定义一个用来初始化GPIO的结构体 aaa.GPIO_Pin = GPIO_Pin_11; aaa.GPIO_Speed = GPIO_Speed_50MHz; aaa.GPIO_Mode = GPIO_Mode_Out_PP;//普通推挽输出 GPIO_Init(GPIOB,&aaa); //3、配置PB12--ECHO 为输入模式 aaa.GPIO_Pin = GPIO_Pin_12; aaa.GPIO_Speed = GPIO_Speed_50MHz; aaa.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式(自行百度了解上拉) GPIO_Init(GPIOB,&aaa); //4、测距时计时用的定时器的配置 TIM3 TIM4 已经用了 TIM2 TIM_TimeBaseInitTypeDef ccc;//初始化定时器用的结构体 ccc.TIM_Prescaler = 72-1;//72Mhz/72 = 1Mhz 1个脉冲对应1us ccc.TIM_CounterMode = TIM_CounterMode_Up;//递增计数模式 ccc.TIM_Period = 65536-1;//ARR 20000 16Bit定时器 自动重装载值 刚好周期为20ms ccc.TIM_ClockDivision = TIM_CKD_DIV1;//上面的预分频系数够了 这里设置为1分频即不分频 TIM_TimeBaseInit(TIM2,&ccc); //5、先关闭定时器TIM2 TIM_Cmd(TIM2,DISABLE); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
(超声波测距)
//获取超声波测距的函数--单位厘米 float HCSR_GetDistance(void) { //1、先控制TRIG引脚输出一个至少10us高电平 启动超声波模块 GPIO_SetBits(GPIOB,GPIO_Pin_11); delay_us(15); GPIO_ResetBits(GPIOB,GPIO_Pin_11); //2、等待ECHO引脚被超声波模块自己拉高 在拉高的瞬间我们开始计时即可 while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_12) == 0); //开启定时器2让TIM2的计数器开始计数 并且在开启计数前 清空计数值 TIM2->CNT = 0;//设置计数器的计数值初值为0 TIM_Cmd(TIM2,ENABLE); //3、高电平开始计时 while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_12) == 1); //ECHO高电平结束 结束计数 TIM_Cmd(TIM2,DISABLE); //4、跳出来时 count是多少就代表高电平持续了多少us //可以开始计算距离 厘米单位 return 0.017*(TIM2->CNT); //0.017根据公式计算而得 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
(超声波避障实现)
void turn_to_find(){ while(1){ TIM3->CCR4 = 1000;//right 45* if(HCSR_GetDistance()>30.0){//大于30 小车右转45度 Car_Speed_Init(1999,0,0,0); delay_ms(300); break; } TIM3->CCR4 = 500;//right 90* if(HCSR_GetDistance()>30.0){//大于30 小车右转90度 Car_Speed_Init(1999,0,0,0) delay_ms(600); break; } TIM3->CCR4 = 2000;//left 45* if(HCSR_GetDistance()>30.0){//大于30 小车左转45度 Car_Speed_Init(0,0,1999,0) delay_ms(300); break; } TIM3->CCR4 = 2500;//left 90* if(HCSR_GetDistance()>30.0){//大于30 小车左转90度 Car_Speed_Init(0,0,1999,0) delay_ms(600); break; } //都找不到 小车继续后退 Car_Speed_Init(0,1999,0,1999); delay_ms(100); break; } TIM3->CCR4 = 1500;//舵机摆正 }; //main函数 TIM3->CCR4 = 1500;//舵机摆正 while(1) { //1. 大于30 小车前进 Car_Speed_Init(1800,0,1800,0); while(HCSR_GetDistance()>30.0) delay_ms(500); //2. 小于30 小车停止 Car_Speed_Init(0,0,0,0); //3. 小于40 小车一边后退一边找方向 while(HCSR_GetDistance()<40.0) {Car_Back(0,1800,0,1800);delay_ms(500);turn_to_find();} }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
七、小车红外避障(结合超声波避障)
1、原理分析
通过判断红外线的返回信号,判断左右两边是否有障碍物。
- 1
2、代码步骤
//红外线避障模块初始化
1.使能时钟
2.特定引脚初始化
//红外避障+超声波避障
1. 大于30且两边无障碍 小车前进
2. 大于30但左边有障碍 小车在右边45 90找方向
3. 大于30但右边有障碍 小车在左边45 90找方向
4. 小于30 小车一边后退一边查找方向
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
3、代码实现
(红外线避障模块初始化)
void hongwai_init(void){ //1、使能时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //2、初始化端口红外线端口 PB10 PA11 GPIO_InitTypeDef aaa;//定义一个用来初始化GPIO的结构体 aaa.GPIO_Pin = GPIO_Pin_10; aaa.GPIO_Speed = GPIO_Speed_50MHz; aaa.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式 GPIO_Init(GPIOB,&aaa); bbb.GPIO_Pin = GPIO_Pin_11; bbb.GPIO_Speed = GPIO_Speed_50MHz; bbb.GPIO_Mode = GPIO_Mode_IPU;//上拉输入模式 GPIO_Init(GPIOA,&aaa); } //GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_10)==0 为左边有障碍 //GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11)==0 为右边有障碍
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
(红外避障+超声波避障)
TIM3->CCR4 = 1500;//舵机摆正 while(1) { //1. 大于30且两边无障碍 小车前进 Car_Speed_Init(1800,0,1800,0); while(HCSR_GetDistance()>30.0&&GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11)==1&&GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10)==1) delay_ms(500); //2. 大于30但左边有障碍而右边无障碍 小车在右边45 90找方向 if(HCSR_GetDistance()>30.0&&GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11)==1&&GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10)==0) turn_right_to_find(); //3. 大于30但右边有障碍而左边无障碍 小车在左边45 90找方向 if(HCSR_GetDistance()>30.0&&GGPIO_ReadInputDataBit(GPIOA, GPIO_Pin_11)==0&&GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10)==1) turn_left_to_find(); //4. 小于30 小车一边后退一边查找方向 if(HCSR_GetDistance()<30.0){ while(HCSR_GetDistance()<40.0) {Car_Back(0,1800,0,1800);delay_ms(500);turn_to_find();} } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
八、小车沿白线循迹
1、原理分析
1.使用4路红外循迹返回的信号,完成小车沿线循迹功能的实现
2.车头4路循迹模块对应的芯片引脚为(从左到右)分别为PA12,PB13,PB14,PB15
3.端口遇到白色信号为0,未遇到信号未1
- 1
- 2
- 3
2、代码实现
(循迹模块初始化)
void xunji_init(void) { //1、使能时钟 GPIOB GPIOA RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE); //2、GPIO PB13 PB14 PB15初始化 GPIO_InitTypeDef eee; eee.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; eee.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉 eee.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &eee); //3、GPIO PA12 初始化 eee.GPIO_Pin = GPIO_Pin_12; eee.GPIO_Mode = GPIO_Mode_IPU;//配置GPIO模式,输入上拉 eee.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &eee); };
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
(获取循迹模块的信号)
//从左到右读入四个端口的信号
uint8_t read_xunji_data(void){
uint16_t buff = 0;
buff = (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_12)<<3)+
(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13)<<2)+
(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14)<<1)+
(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_15)<<0);
return buff;
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
(实现小车沿白线循迹——如果沿黑线只需要调换01)
//main() while(1){ //1.白线在左车头 if(data==0111||data==1011||data==0011||data==0001){ Car_Speed_Init(1800,0,0,0); delay_ms(500); } //2.白线在右车头 else if(data==1110||data==1101||data==1100||data==1000){ Car_Speed_Init(0,0,1800,0); delay_ms(500); } //3.其他情况直行 else{ Car_Speed_Init(1800,0,1800,0); delay_ms(500); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
九、实验总结——嵌入式开发的流程步骤
- 了解硬件背后原理,信号状态代表了现实情况的什么信息。
- 根据系统的库函数,对特定使用的模块进行初始化。
- 巧妙利用计时器,实现电平不同时间的输出来操作硬件,以及获取关键信息。
- 根据基础的功能实现,自己按照一定的逻辑,实现智能小车的避障等功能。
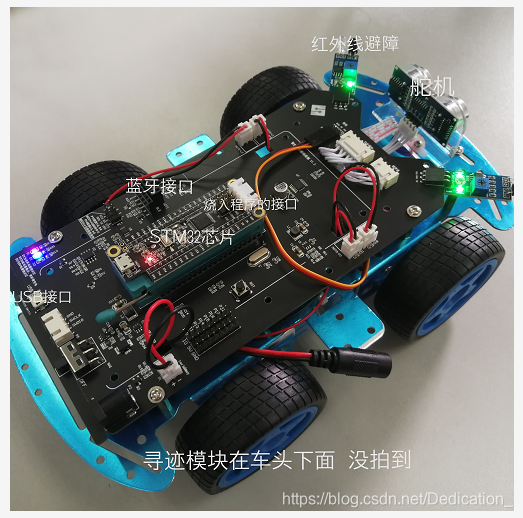
十、小车实物图介绍