
- 1Django 小实例S1 简易学生选课管理系统 —— 二、新建项目(project)、设置、运行_django+sqlite实现一个报名选课网站
- 2AIGC被ChatGPT带火!底层基础算力有望爆发式增长_aigc中间层 例子
- 3开源IPad Pro应用IDE:使用SSH远程连接服务器进行云端编程开发
- 4模拟算法刷题笔记【蓝桥杯】_小明有 n 颗石子,按顺序摆成一排,他准备用胶水将这些石子粘在一起。每颗石子有自
- 5Gitee版本控制
- 6口述面试题思路_口述算法题一般考什么
- 7Python反编译exe获取封装源代码
- 8Rancher入门到精通-nginx-ingress配置性能优化_rancher ingress timeout
- 9怎样通过本地电脑搭建SFTP服务器,并实现公网访问?_freeftpd不能创建目录
- 10Dubbo框架学习-负载均衡_dubbo 轮训 随机
基于stm32的智能小车设计(一)_基于stm32智能小车毕业设计
赞
踩
目录
单片机智能小车一直是大家很喜欢的小设计,智能小车的制作虽然难度不高,但是对于初学者来说,由于陌生,因此也总是觉得门槛高。事实上,很多东西都禁不起深挖,当你做完之后才会发现,原来也不过如此。
我计划在接下来的一段时间里,断断续续地给大家带来智能小车的相关设计,由易到难。涉及蓝牙控、WIFI控、NRF24L01控制,红外遥控控制,红外、超声波避障、寻迹等。每一篇都是一个完整的设计,有着完整的软硬件分析过程,希望可以给你帮助。
本节将制作一个超声波避障的小车。
一、原理简述
作为智能小车,最基本的一点肯定是解决电机驱动的问题。
现在市场上有许多适合小车电机驱动的模块,常见的有L298N、L9110S、DRV8833、TB6612等。这些芯片/模块各有优劣,但是控制原理和方法基本相似。这些芯片/模块的详细介绍可以参照第二章系统硬件设计,将详细地介绍上述几个芯片/模块的重要参数以及使用方法。
电机驱动解决后,接下来就是超声波模块。超声波配合舵机,可以轻松实现避障,使得小车看上去更加智能。
本设计主将以stm32为核心,配合电机驱动、舵机和超声波模块,实现小车的自动避障功能。
二、系统硬件设计
1.电机驱动选型
1.1 L298N
工作电压:2.5~46V,
单通道最大输出电流:2A,
逻辑电源(Vss):4.5~7V,
低电平输入范围:-0.3~1.5V,
高电平输入范围:2.3~Vss,
可驱动两路电机。
应用电路图:
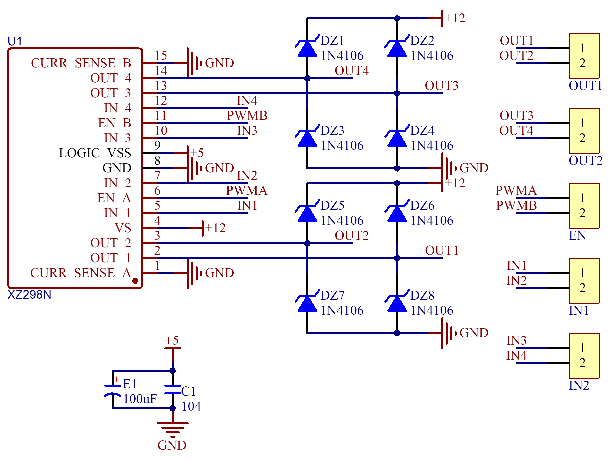
上述应用电路为参考电路,VS和VSS都可以使用5V(不建议使用3.3V),IN输入以及PWM可以使用5V或者3.3V单片机,注意PCB板布线适当加粗,且供电电池保持充足电量。
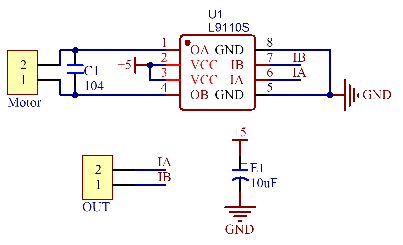
1.2 L9110
工作电压:2.5V~12V,
连续电流输出能力:DIP8 1.0A(8V)
SOP8 0.8A(8V),
输入高电平:2.5V~10V
输入低电平:<0.7V,
单路输出。
真值表:

应用电路图:
1.3 DRV8833
输入电压:2.7V~10.8V,
输出电流(VM = 5V,25°C 时),
– 采用 PWP/RTY 封装:每条 H 桥的 RMS 电流为 1.5A,峰值电流为 2A;
– 采用 PW 封装:每条 H 桥的 RMS 电流为500mA,峰值电流为 2A;
• 可以将输出并联,以实现
– 3A RMS 电流、4A 峰值电流(PWP 和 RTY 封装);
– 1A RMS 电流、4A 峰值电流(PW 封装);
可驱动两路电机。
应用电路图:
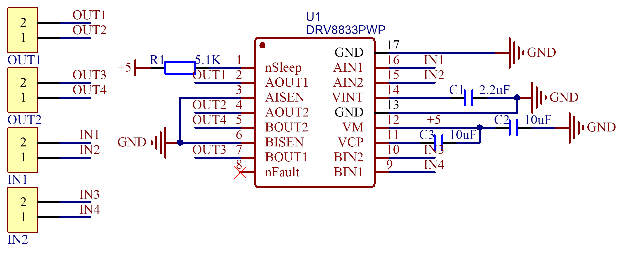
上述应用电路为参考电路,IN输入以及PWM可以使用5V或者3.3V单片机,注意PCB板布线适当加粗,且供电电池保持充足电量。
1.4 TB6612
输入电压:
VCC:2.7~5.5V 芯片小信号电源
VM:2.5~13.5V 电机供电
电流:MAX 1.0A VM>=4.5V
MAX 0.4A 2.5<=VM<4.5V
PWM:最大支持100KHz。
可驱动两路电机。
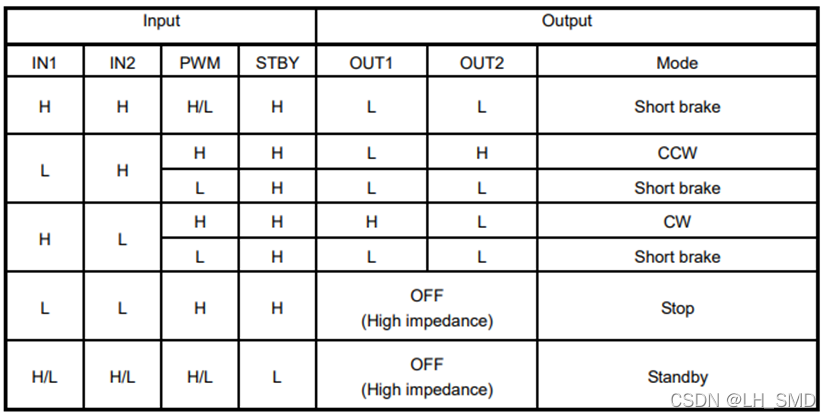
真值表:
应用电路图:
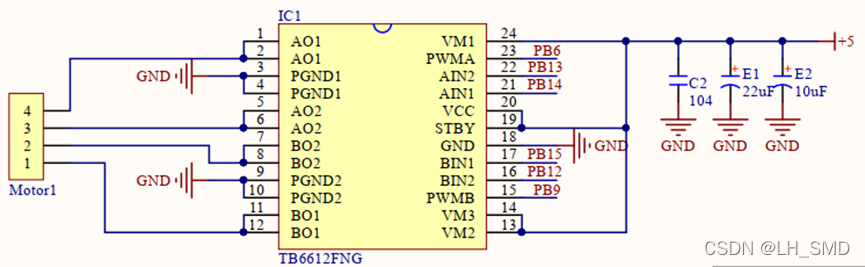
这些芯片各有优劣,可根据实际情况选择合适的芯片。在本设计中,将采用TB6612作为电机驱动。值得说明的是,目前TB6612已经停产,且价格相对高昂,请谨慎选择。(那为什么我会选择这个呢,因为我还有库存,顺便用了,哈哈哈哈)
2.系统整体硬件设计
在本设计中,硬件分为stm32主控制模块、TB6612电机驱动模块、超声波模块、舵机模块四个部分。其整体逻辑如下图所示:
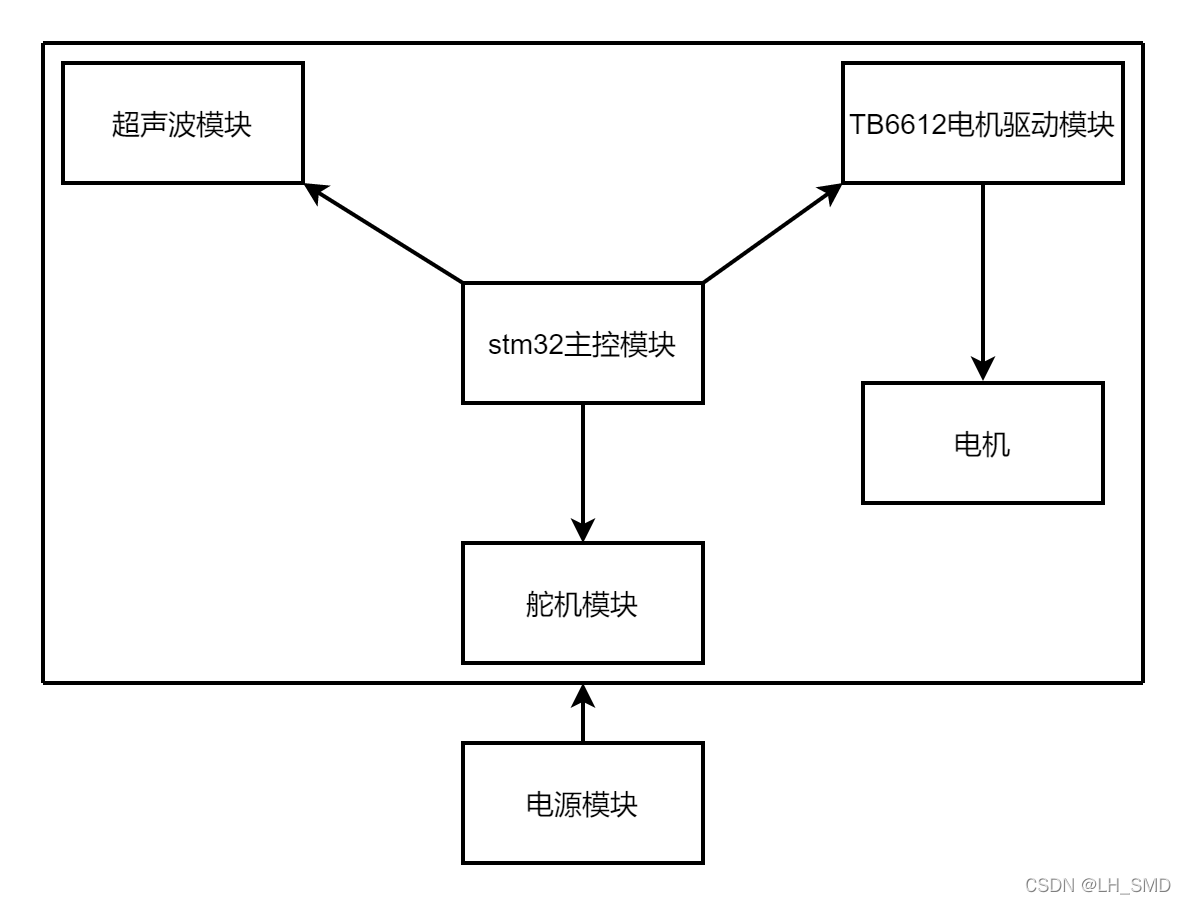
这里需要注意电池的选型,建议选择三洋、松下、索尼等品牌,这些品牌的电池一般输出电流稳定,动力充足。不能贪便宜,否则到时候效果不佳,坑害的是自己。
3.stm32主控制模块
stm32最小系统板原理图如下所示(看不清请放大):
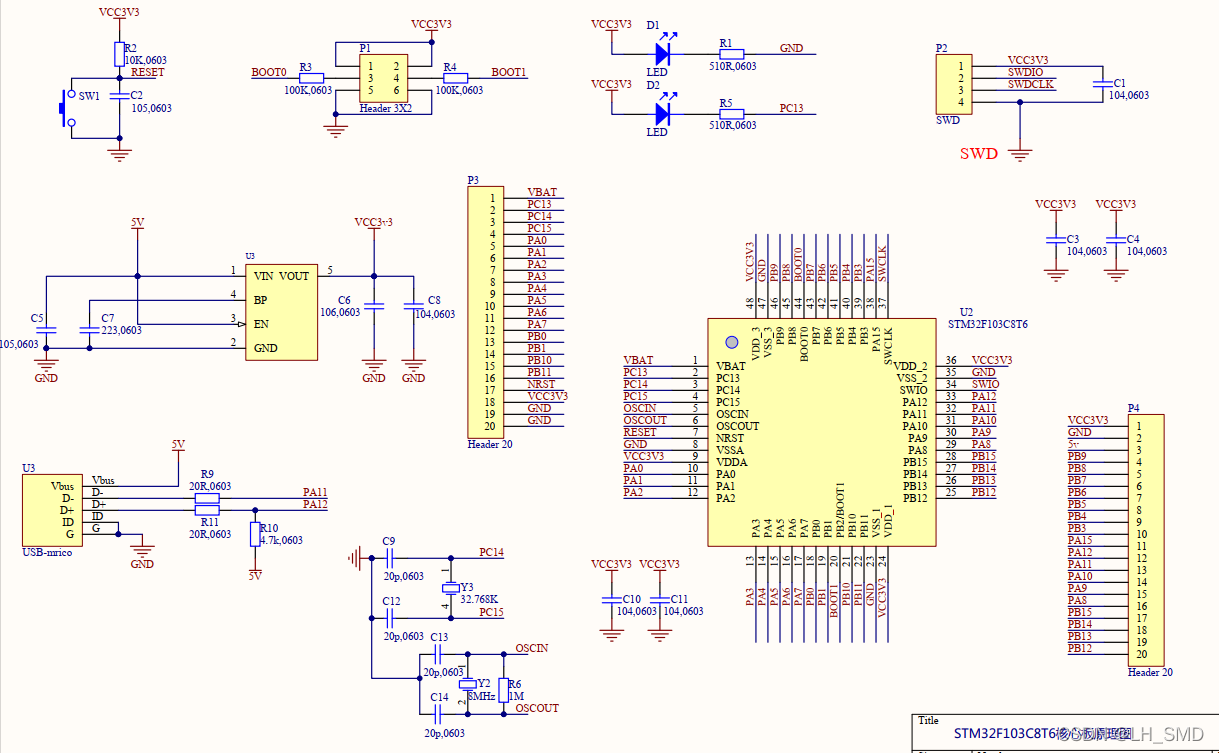
stm32f103c8t6为意法半导体生产的一款高性能32位处理器,采用ARM cortex-M3为内核,在稳定运行的情况下,主频可高达72M,是传统51单片机的性能的几十倍,能完成许多复杂的功能。其最小系统主要包括:stm32芯片、复位电路、时钟电路、电源电路、代码烧录电路和boot选择电路。
stm32f103c8t6用着丰富的外设,例如GPIO、USART、ADC、PWM、TIMER、硬件SPI、硬件IIC、USB等。在本设计中,将会使用到的它的外设有:GPIO、TIMER和PWM。其中,GPIO和TIMER用于控制电机正反转、控制超声波测距以及舵机转向引脚的信号;PWM用于调节电机转速。
4.舵机云台
舵机云台采用常用的SG90,其实物图如下:

SG90只有三根线:VCC、GND和信号线(4-6V供电,信号引脚可用5V,也可用3.3V)。其中信号线就是控制舵机旋转的。控制原理图很简单,只需要控制单片机产生周期为20ms,高电平在0.5ms~2.5ms之间的一个方波,事实上,经过实际测试,周期在3-20ms都是可以的。舵机最大只能180°旋转,这里,我们以90°的位置为中心线,具体旋转情况如下(注意左右偏的参考点,这里只表示两种偏向):
高电平为1.5ms时,舵机位于中心位置。
高电平为0.5ms时,舵机左偏90°。
高电平为2.5ms时,舵机右偏90°。
具体软件控制方法,将在软件部分详细介绍。
5.超声波模块
超声波测距模块的实物图如下:

超声波模块时利用声波在空气中传输的为原理而设计的。模块通过trig引脚启动声波,此时开始计时,当发出的声波遇到障碍物就会反弹,反弹回来的声波会被超声波模块的探头接收,此时echo引脚状态将发生改变,计时停止,根据声波在控制中传播速度,就可以很方便计算出超声波距离障碍物的距离。
此模块的供电为5V,trig和echo可接5V单片机,也可以接3.3V单片机。
三、系统软件设计
1.系统整体软件设计
软件的整体流程图如下:
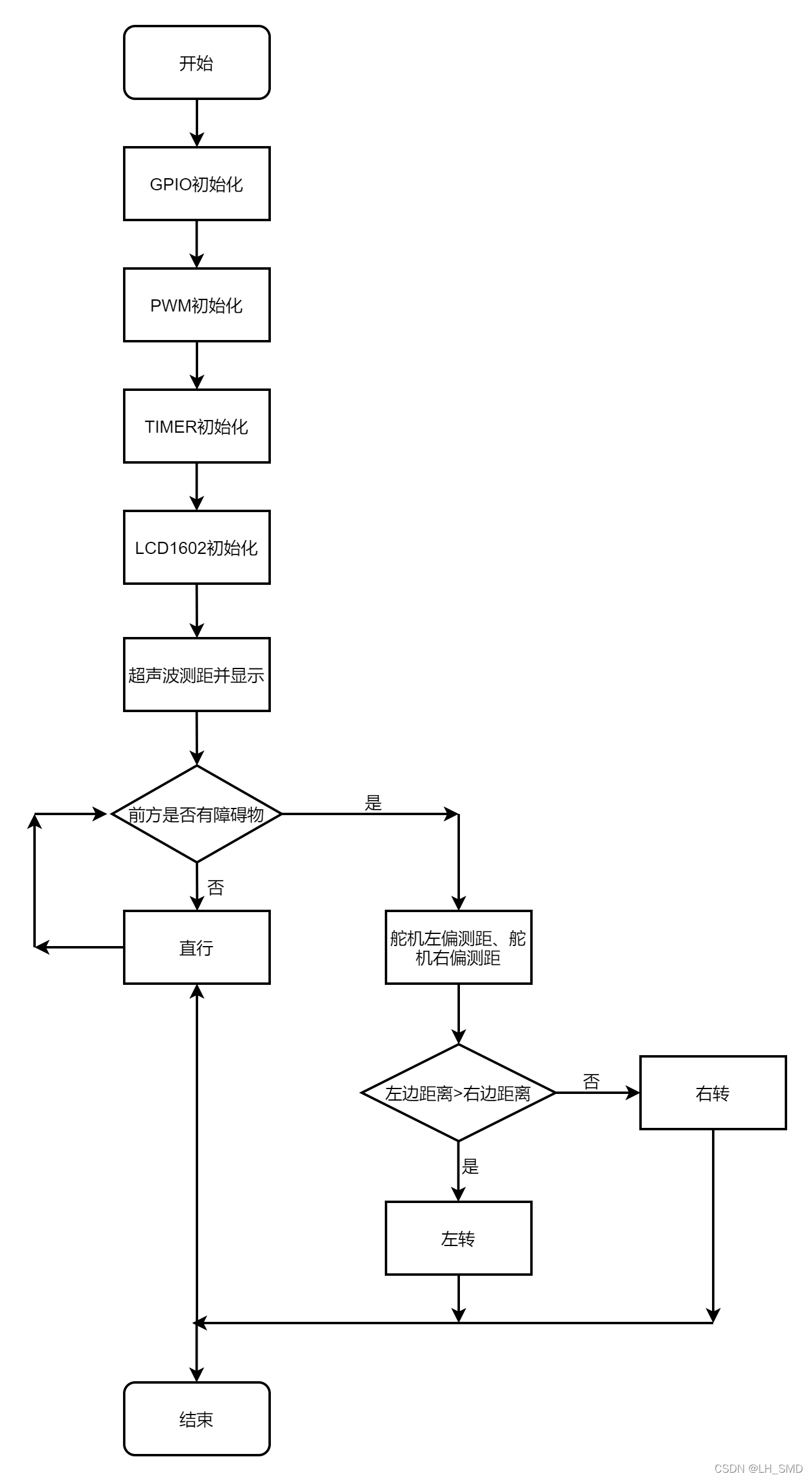
stm32首先需要将所有需要用到外设进行初始化,然后进入主循环,不断地进行超声波测距并显示,当前方遇到障碍物时,将启动舵机左右旋转进行分别测距,并将两个距离值进行比较,然后车身往距离更大的一方旋转。如此往复,就完成了整个超声波避障的过程。
2.电机驱动及速度的控制
在本设计中,电机速度控制由两路PWM控制,分别接在了stm32的PB6和PB9上,为TIM4的通道一和通道四,但由于本设计使用的stm32具体型号为stm32f103c6t6,其外设并没有TIM4,因此,这里采用定时器周期变化产生PWM。事实上,可将TB6612的PWMA和PWMB直接接高电平,这样,电机将在该电压下最高功率运行,但是这样不利于控制。
在使用定时器周期变化产生PWM前,首先需要初始化TB6612连接stm32的所有GPIO,其初始化代码如下所示:
-
- void TB6612_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化
- GPIO_ResetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_9);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化
- GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
- }
为了使用这些GPIO方便,不妨使用宏定义来给这些GPIO重新起个名字,如下:
- #define PWMA PBout(6)
- #define PWMB PBout(9)
-
- #define AIN1 PBout(14)
- #define AIN2 PBout(13)
-
- #define BIN1 PBout(15)
- #define BIN2 PBout(12)
使用stm32定时器,首先需要使能所在总线时钟,然后设置定时器定时时间及定时方式,打开定时器,最后编写定时器中断服务函数即可。其具体代码如下:
-
- void TIM1_Int_Init(u16 arr,u16 psc)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //时钟使能
-
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
-
- NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn; //TIM3中断
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
- NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
-
- TIM_Cmd(TIM1, ENABLE); //使能TIMx外设
-
- }
- //定时器3中断服务程序
- void TIM1_UP_IRQHandler(void) //TIM3中断
- {
- if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
- {
- TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
- PWMA = !PWMA;
- PWMB = !PWMB;
- }
- }
然后在主函数中调用这两个函数,这里不妨控制定时器的频率为100KHz,产生的PWM频率为50KHz,占空比为50%,如下:
- TB6612_GPIO_Init();
- TIM1_Int_Init(719, 0);//72000000/720 = 100 000
如果想让电机控制的速度更快,直接加大定时器3的占空比即可。
最后就是小车前进、后退,左转、右转和停止的控制了,这个相对简单,具体代码如下:
- void go_straight(void)
- {
- AIN1 = 1;
- AIN2 = 0;
- BIN1 = 1;
- BIN2 = 0;
- }
-
- void go_back(void)
- {
- AIN1 = 0;
- AIN2 = 1;
- BIN1 = 0;
- BIN2 = 1;
- }
-
- void ture_right(void)
- {
- AIN1 = 1;
- AIN2 = 0;
- BIN1 = 0;
- BIN2 = 1;
- }
-
- void ture_left(void)
- {
- AIN1 = 0;
- AIN2 = 1;
- BIN1 = 1;
- BIN2 = 0;
- }
-
- void stop(void)
- {
- AIN1 = 0;
- AIN2 = 0;
- BIN1 = 0;
- BIN2 = 0;
- }
至此,有关电机的控制结束,事实上,换用其他的电机驱动芯片,其驱动方式和上面驱动方式大同小异,甚至直接照搬照抄就可以。
3.舵机云台的控制
舵机云台的控制原理在前文中已经简单介绍过,软件部分,将采用PWM来控制舵机的转动。在原理图的设计中,舵机信号的控制引脚连接到了STM32的PB5,为定时器3的通道2,因此,这里需要开启stm32定时3通道2的PWM初始化。如下:
- void TIM3_PWM_SG90_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
-
- //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
-
- //初始化TIM3
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
-
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
-
- TIM_Cmd(TIM3, ENABLE); //使能TIM3
-
-
- }
同样,为了使用方便,这里将一些GPIO,频率,旋转角度等(这里需要联系舵机的控制原理来理解,这里就不再赘述)相关信息,用宏来定义:
- #define TIM3_PWM_SG90_PERIOD (1200-1)
- #define TIM3_PWM_SG90_PRESCALER (1200-1)
-
- /* 频率50HZ 20ms */
- #define SG90_PWM_FREQ 72000000/((TIM3_PWM_SG90_PERIOD)*(TIM3_PWM_SG90_PRESCALER))
-
- #define SG90_CENTRE ((int)(1.5/20*TIM3_PWM_SG90_PERIOD))
- #define SG90_RIGHT ((int)(0.5/20*TIM3_PWM_SG90_PERIOD))
- #define SG90_LEFT ((int)(2.5/20*TIM3_PWM_SG90_PERIOD))
PWM的频率为50Hz,及20ms,在主函数调用:
TIM3_PWM_SG90_Init(TIM3_PWM_SG90_PERIOD,TIM3_PWM_SG90_PRESCALER);//PWM频率=72000/((1200)*(1200))=50hz 后续只需要在需要控制舵机旋转时,调用函数即可,例如,我想控制舵机云台左转,这里这么操作:
TIM_SetCompare2(TIM3, SG90_LEFT);4.超声波测距
超声波的控制原理同样在硬件介绍章节中做了介绍。具体的可以查看超声波模块的数据手册。
首先,需要初始化一个定时器,用于后面对于声波发出到返回的计时,这里使用stm32的定时器2来计时,其初始化函数如下:
- void TIM2_Ultrasonic_Init(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer;
- NVIC_InitTypeDef NVIC_InitStructer;
-
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
-
- /*定时器TIM2初始化*/
- TIM_DeInit(TIM2);
- TIM_TimeBaseInitStructer.TIM_Period = 999;//定时周期为1000
- TIM_TimeBaseInitStructer.TIM_Prescaler = 71; //分频系数72
- TIM_TimeBaseInitStructer.TIM_ClockDivision = TIM_CKD_DIV1;//不分频
- TIM_TimeBaseInitStructer.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructer);
-
- TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//开启更新中断
-
- NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority = 2;
- NVIC_InitStructer.NVIC_IRQChannelSubPriority = 2;
- NVIC_InitStructer.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructer.NVIC_IRQChannelCmd = ENABLE;
-
- NVIC_Init(&NVIC_InitStructer);
- TIM_Cmd(TIM2, DISABLE);//关闭定时器使能
-
- }
然后就可以开始测距了。
需要控制超声波发出声波,如下:
- GPIO_SetBits(TRIG_PORT, TRIG_PIN); //拉高信号,作为触发信号
- delay_us(20); //高电平信号超过10us
- GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
然后,需要等待超声波遇到障碍物回弹,同时开启定时器计时:
- /*等待回响信号*/
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
- TIM_Cmd(TIM2,ENABLE);//回响信号到来,开启定时器计数
-
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//回响信号消失
- TIM_Cmd(TIM2, DISABLE);//关闭定时器
得到从定时器开启到结束的时间:
tim = TIM_GetCounter(TIM2);//获取计TIM2数寄存器中的计数值,一边计算回响信号时间得到这个时间后,根据声波在空气中传播的速度为340m/s(25℃),就可以得到超声波模块距离障碍物的大致距离(单位:cm):
distance = (tim + overcount * 1000) / 58.0;//通过回响信号计算距离为了使得测量的距离更加准确和稳定,这里采用多次测量求平均值的方法:去掉一个最大值,去掉一个最小值,然后求平均值。如下:
- float get_ultrasonic_distance(void)
- {
- float distance = 0;
- u16 tim;
- GPIO_SetBits(TRIG_PORT, TRIG_PIN); //拉高信号,作为触发信号
- delay_us(20); //高电平信号超过10us
- GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
-
- /*等待回响信号*/
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
- TIM_Cmd(TIM2,ENABLE);//回响信号到来,开启定时器计数
-
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//回响信号消失
- TIM_Cmd(TIM2, DISABLE);//关闭定时器
-
- tim = TIM_GetCounter(TIM2);//获取计TIM2数寄存器中的计数值,一边计算回响信号时间
-
- distance = (tim + overcount * 1000) / 58.0;//通过回响信号计算距离
-
- TIM2->CNT = 0; //将TIM2计数寄存器的计数值清零
- overcount = 0; //中断溢出次数清零
- delay_ms(1);
- return distance; //距离作为函数返回值
- }
-
-
- void bubble(unsigned long *a, int n)
-
- {
- int i, j, temp;
- for (i = 0; i < n - 1; i++)
- {
- for (j = i + 1; j < n; j++)
- {
- if (a[i] > a[j])
- {
- temp = a[i];
- a[i] = a[j];
- a[j] = temp;
- }
- }
- }
- }
-
- float get_average_distance(void)
- {
- float Distance;
- unsigned long ultrasonic[5] = {0};
- int a,num = 0;
- int lastDistance;
- while (num < 5)
- {
- Distance = get_ultrasonic_distance();
- while(((int)Distance >= 500 || (int)Distance == 0))
- {
- Distance = get_ultrasonic_distance();
- }
-
- if(Distance >0 || (int)Distance <500)
- {
- ultrasonic[num] = Distance;
- //lastDistance=Distance;
- num++;
- delay_ms(10);
- }
-
- }
- num = 0;
- bubble(ultrasonic, 5);
- Distance = (ultrasonic[1] + ultrasonic[2] + ultrasonic[3]) / 3;
- return Distance;
- //printf("Distance=%d\n",Distance);
- }
-
至此,超声波测距介绍结束。
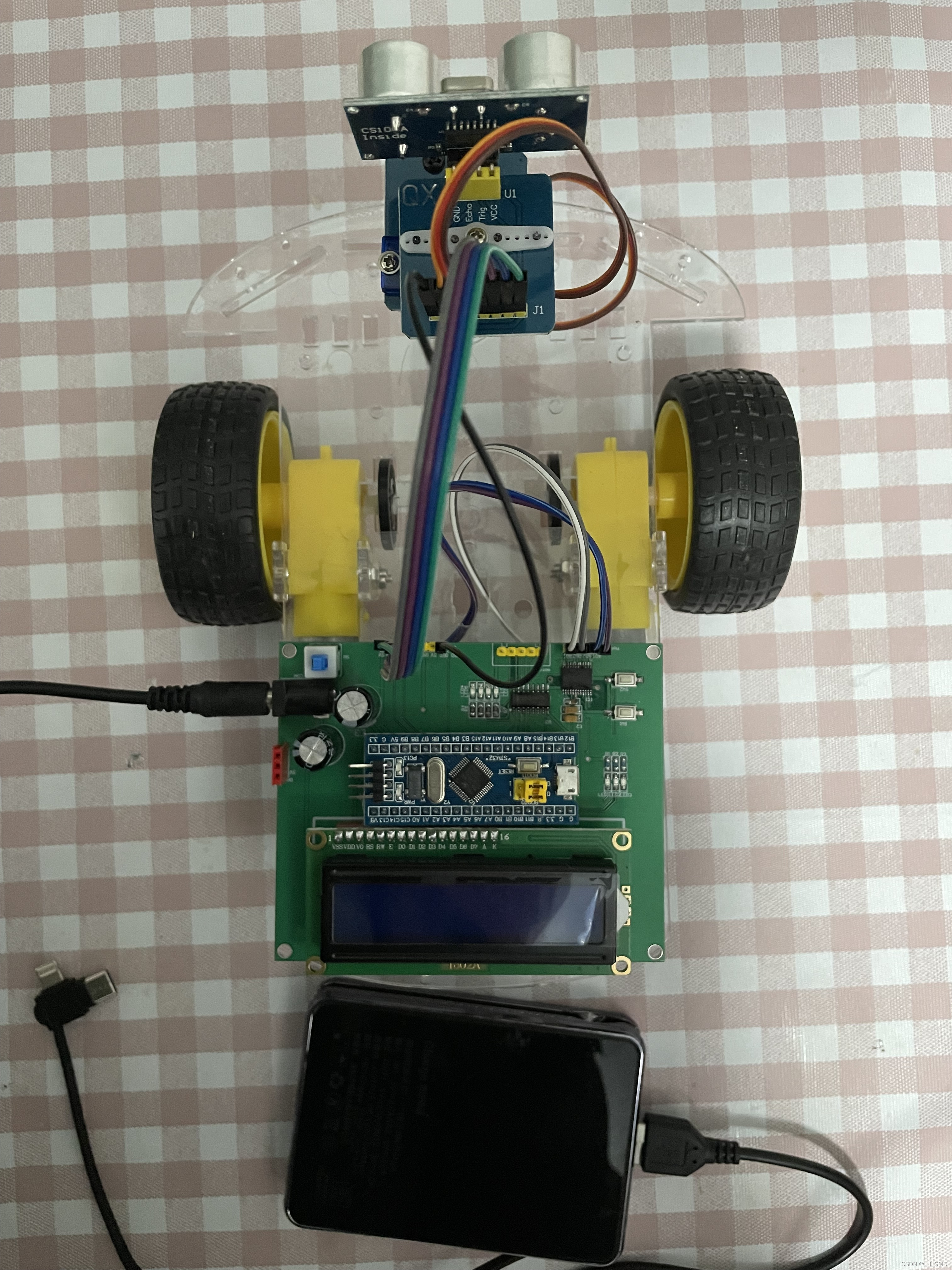
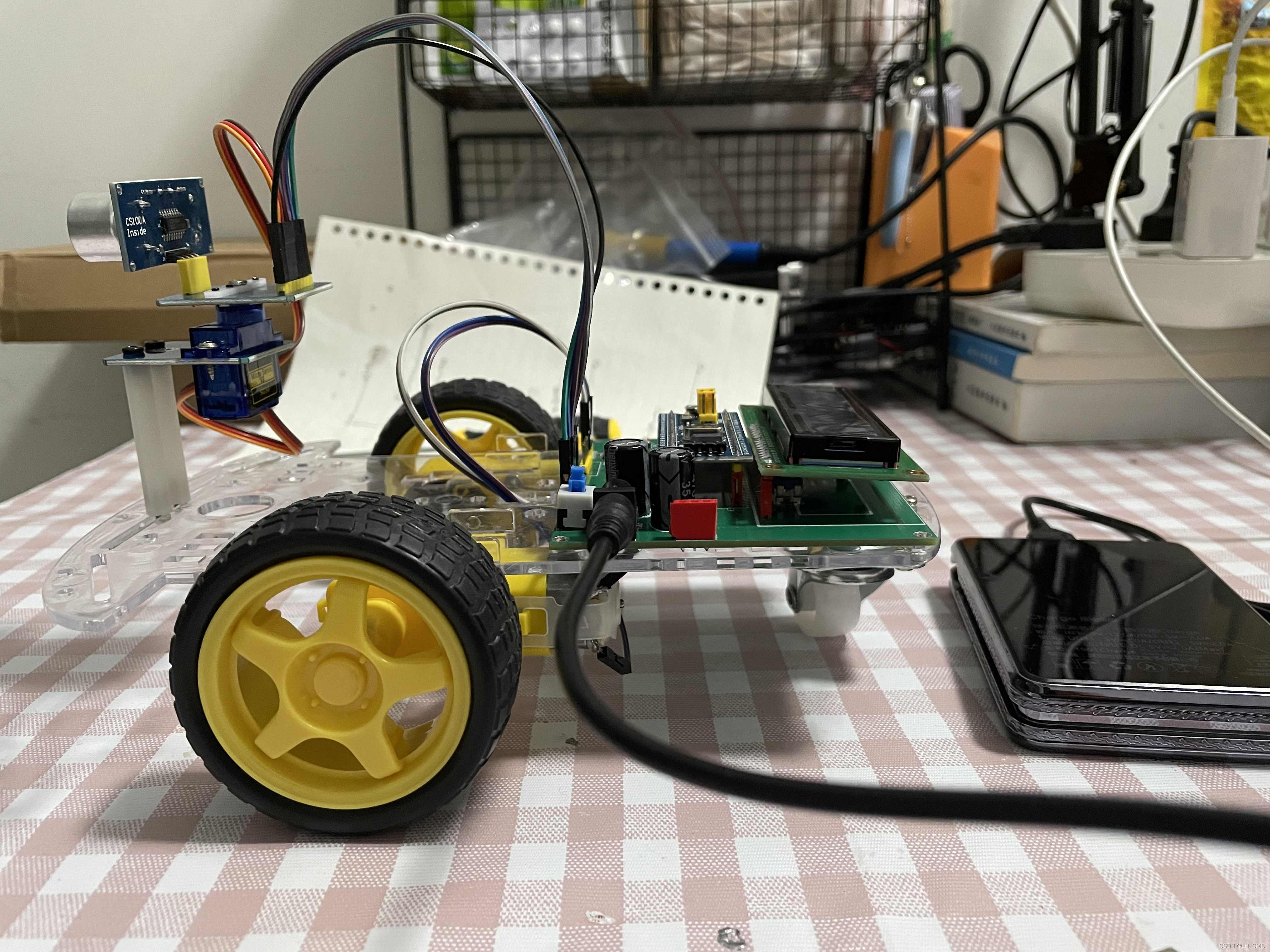
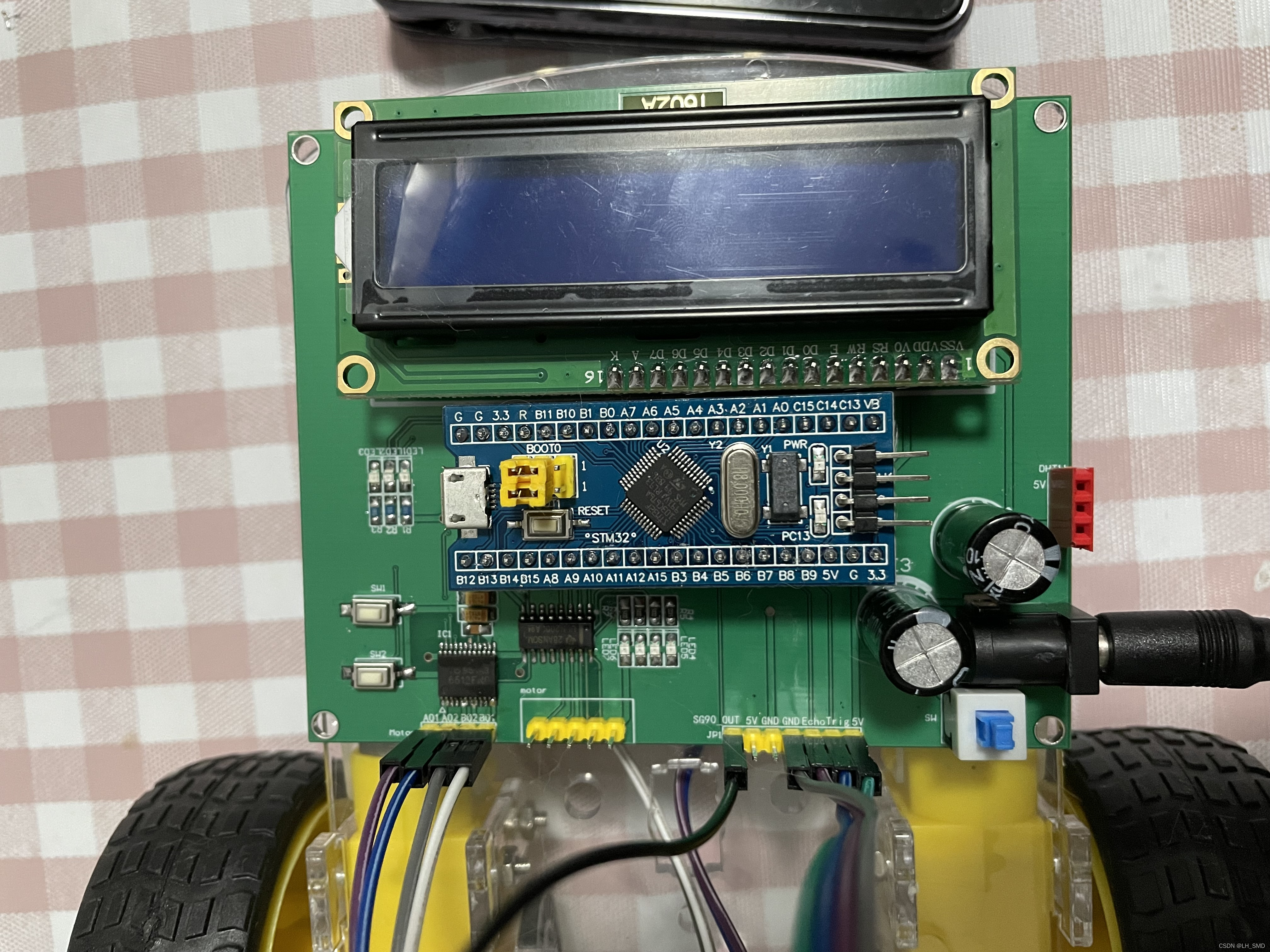
四、实物展示
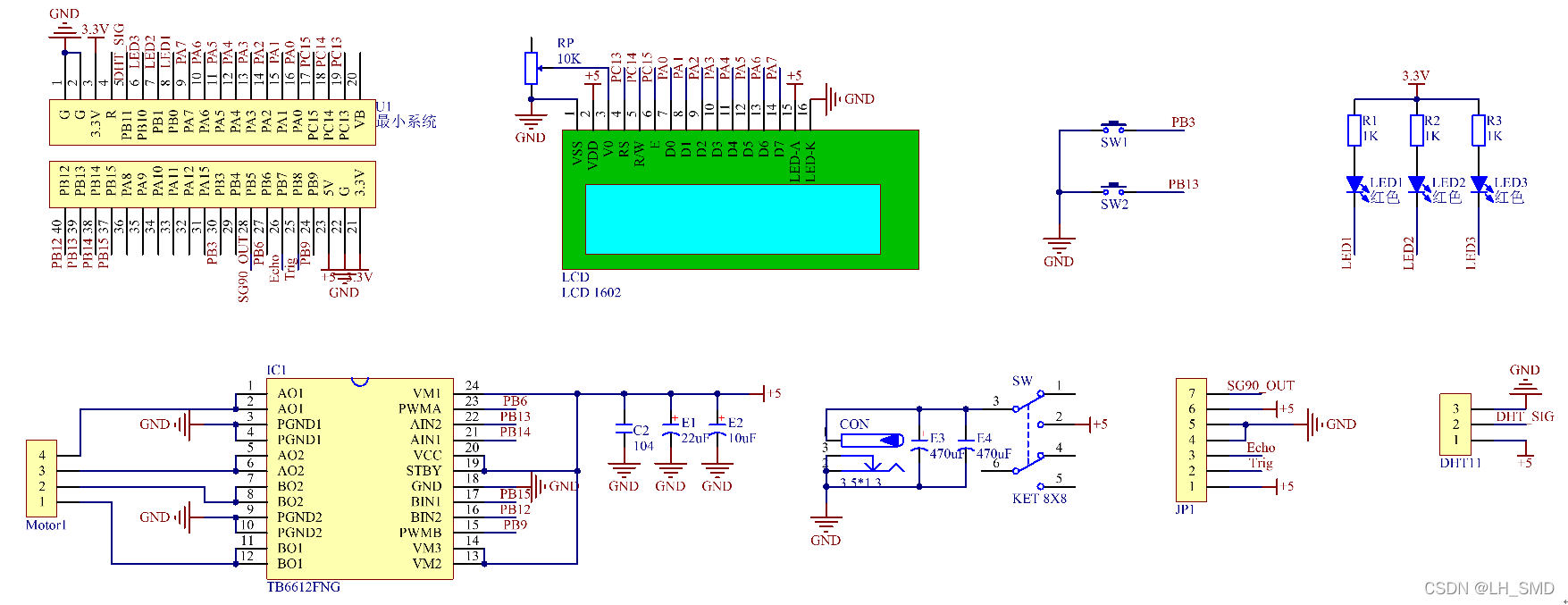
五、完整原理图
六、完整代码
pwm.c
- #include "pwm.h"
-
- //TIM3 PWM部分初始化
- //PWM输出初始化
- //arr:自动重装值
- //psc:时钟预分频数
- void TIM3_PWM_SG90_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
-
- //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
-
- //初始化TIM3
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
-
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
-
- TIM_Cmd(TIM3, ENABLE); //使能TIM3
-
-
- }
pwm.h
- #ifndef __PWM_H
- #define __PWM_H
- #include "sys.h"
-
- #define TIM3_PWM_SG90_PERIOD (1200-1)
- #define TIM3_PWM_SG90_PRESCALER (1200-1)
-
- /* 频率50HZ 20ms */
- #define SG90_PWM_FREQ 72000000/((TIM3_PWM_SG90_PERIOD)*(TIM3_PWM_SG90_PRESCALER))
-
- #define SG90_CENTRE ((int)(1.5/20*TIM3_PWM_SG90_PERIOD))
- #define SG90_RIGHT ((int)(0.5/20*TIM3_PWM_SG90_PERIOD))
- #define SG90_LEFT ((int)(2.5/20*TIM3_PWM_SG90_PERIOD))
-
-
- void TIM3_Int_Init(u16 arr,u16 psc);
- void TIM3_PWM_SG90_Init(u16 arr,u16 psc);
-
- #endif
car.c
- #include "car.h"
-
-
- void TIM1_Int_Init(u16 arr,u16 psc)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //时钟使能
-
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE ); //使能指定的TIM1中断,允许更新中断
-
- NVIC_InitStructure.NVIC_IRQChannel = TIM3_UP_IRQn; //TIM3中断
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
- NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
-
- TIM_Cmd(TIM1, ENABLE); //使能TIMx外设
-
- }
- //定时器1中断服务程序
- void TIM1_UP_IRQHandler(void) //TIM1中断
- {
- if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
- {
- TIM_ClearITPendingBit(TIM1, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
- PWMA = !PWMA;
- PWMB = !PWMB;
- }
- }
-
-
- void TB6612_GPIO_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化
- GPIO_ResetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_9);
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
- GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化
- GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
- }
-
-
- void go_straight(void)
- {
- AIN1 = 1;
- AIN2 = 0;
- BIN1 = 1;
- BIN2 = 0;
- }
-
- void go_back(void)
- {
- AIN1 = 0;
- AIN2 = 1;
- BIN1 = 0;
- BIN2 = 1;
- }
-
- void ture_right(void)
- {
- AIN1 = 1;
- AIN2 = 0;
- BIN1 = 0;
- BIN2 = 1;
- }
-
- void ture_left(void)
- {
- AIN1 = 0;
- AIN2 = 1;
- BIN1 = 1;
- BIN2 = 0;
- }
-
- void stop(void)
- {
- AIN1 = 0;
- AIN2 = 0;
- BIN1 = 0;
- BIN2 = 0;
- }
car.h
- #ifndef __CAR_H__
- #define __CAR_H__
-
- #include "sys.h"
- #include "delay.h"
-
- #define PWMA PBout(6)
- #define PWMB PBout(9)
-
- #define AIN1 PBout(14)
- #define AIN2 PBout(13)
-
- #define BIN1 PBout(15)
- #define BIN2 PBout(12)
-
-
- void TIM3_Int_Init(u16 arr,u16 psc);
- void TB6612_GPIO_Init(void);
- void go_straight(void);
- void ture_left(void);
- void go_back(void);
- void ture_right(void);
- void stop(void);
-
- #endif
ultrasonic.c
- #include "ultrasonic.h"
-
- /*记录定时器溢出次数*/
- unsigned int overcount = 0;
-
- void ultrasonic_gpio_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(TRIG_RCC, ENABLE);
- RCC_APB2PeriphClockCmd(ECHO_RCC, ENABLE);
- GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(TRIG_PORT, &GPIO_InitStructure);
-
- GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
- GPIO_Init(ECHO_PORT, &GPIO_InitStructure);
- }
-
- void TIM2_Ultrasonic_Init(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer;
- NVIC_InitTypeDef NVIC_InitStructer;
-
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
-
- /*定时器TIM2初始化*/
- TIM_DeInit(TIM2);
- TIM_TimeBaseInitStructer.TIM_Period = 999;//定时周期为1000
- TIM_TimeBaseInitStructer.TIM_Prescaler = 71; //分频系数72
- TIM_TimeBaseInitStructer.TIM_ClockDivision = TIM_CKD_DIV1;//不分频
- TIM_TimeBaseInitStructer.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructer);
-
- TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//开启更新中断
-
- /*定时器中断初始化*/
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
-
- NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority = 2;
- NVIC_InitStructer.NVIC_IRQChannelSubPriority = 2;
- NVIC_InitStructer.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructer.NVIC_IRQChannelCmd = ENABLE;
-
- NVIC_Init(&NVIC_InitStructer);
- TIM_Cmd(TIM2, DISABLE);//关闭定时器使能
-
- }
-
- void TIM2_IRQHandler(void) //中断,当回响信号很长是,计数值溢出后重复计数,用中断来保存溢出次数
- {
- if(TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET)
- {
- TIM_ClearITPendingBit(TIM2, TIM_IT_Update);//清除中断标志
- overcount++;
- }
- }
- float get_ultrasonic_distance(void)
- {
- float distance = 0;
- u16 tim;
- GPIO_SetBits(TRIG_PORT, TRIG_PIN); //拉高信号,作为触发信号
- delay_us(20); //高电平信号超过10us
- GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
-
- /*等待回响信号*/
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
- TIM_Cmd(TIM2,ENABLE);//回响信号到来,开启定时器计数
-
- while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);//回响信号消失
- TIM_Cmd(TIM2, DISABLE);//关闭定时器
-
- tim = TIM_GetCounter(TIM2);//获取计TIM2数寄存器中的计数值,一边计算回响信号时间
-
- distance = (tim + overcount * 1000) / 58.0;//通过回响信号计算距离
-
- TIM2->CNT = 0; //将TIM2计数寄存器的计数值清零
- overcount = 0; //中断溢出次数清零
- delay_ms(1);
- return distance; //距离作为函数返回值
- }
-
-
- void bubble(unsigned long *a, int n)
-
- {
- int i, j, temp;
- for (i = 0; i < n - 1; i++)
- {
- for (j = i + 1; j < n; j++)
- {
- if (a[i] > a[j])
- {
- temp = a[i];
- a[i] = a[j];
- a[j] = temp;
- }
- }
- }
- }
-
- float get_average_distance(void)
- {
- float Distance;
- unsigned long ultrasonic[5] = {0};
- int a,num = 0;
- int lastDistance;
- while (num < 5)
- {
- Distance = get_ultrasonic_distance();
- while(((int)Distance >= 500 || (int)Distance == 0))
- {
- Distance = get_ultrasonic_distance();
- }
-
- if(Distance >0 || (int)Distance <500)
- {
- ultrasonic[num] = Distance;
- //lastDistance=Distance;
- num++;
- delay_ms(10);
- }
-
- }
- num = 0;
- bubble(ultrasonic, 5);
- Distance = (ultrasonic[1] + ultrasonic[2] + ultrasonic[3]) / 3;
- return Distance;
- //printf("Distance=%d\n",Distance);
- }
ultrasonic.h
- #ifndef __ULTRASONIC_H__
- #define __ULTRASONIC_H__
-
- #include "delay.h"
- #include "sys.h"
-
- #define TRIG_RCC RCC_APB2Periph_GPIOB
- #define ECHO_RCC RCC_APB2Periph_GPIOB
-
- #define TRIG_PIN GPIO_Pin_8
- #define ECHO_PIN GPIO_Pin_7
-
- #define TRIG_PORT GPIOB
- #define ECHO_PORT GPIOB
-
- void ultrasonic_gpio_init(void);
- void TIM2_Ultrasonic_Init(void);
- float get_ultrasonic_distance(void);
- void bubble(unsigned long *a, int n);
- float get_average_distance(void);
-
- #endif
main.c
- #include "led.h"
- #include "delay.h"
- #include "sys.h"
- #include "pwm.h"
- #include "lcd1602.h"
- #include "ultrasonic.h"
- #include <stdio.h>
- #include <string.h>
- #include "car.h"
-
- u8 display_buf[16] = {0};
-
- int main(void)
- {
- float left_distance = 0.0;
- float right_distance = 0.0;
- float current_distance = 0.0;
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init();
- LED_Init();
- LCD1602_Init();
- TIM3_PWM_SG90_Init(TIM3_PWM_SG90_PERIOD,TIM3_PWM_SG90_PRESCALER);//PWM频率=72000/((1200)*(1200))=50hz
-
- ultrasonic_gpio_init();
- TIM2_Ultrasonic_Init();
-
- TB6612_GPIO_Init();
- TIM1_Int_Init(719, 0);//72000000/720 = 100KHz
- TIM_SetCompare2(TIM3, SG90_CENTRE);
- delay_ms(1000);
- while(1)
- {
- current_distance = get_average_distance();
- sprintf((char *)display_buf, "dis:%3.0fcm ", current_distance);
- LCD1602_Show_Str(0,0,display_buf, strlen((char *)display_buf));
- if(current_distance <= 30.0) //距离小于30cm
- {
- stop(); //停止
- delay_ms(100);
- TIM_SetCompare2(TIM3, SG90_LEFT); //舵机左转
- delay_ms(1000);
- left_distance = get_average_distance(); //得到左边的距离
- TIM_SetCompare2(TIM3, SG90_RIGHT); //右转
- delay_ms(1000);
- right_distance = get_average_distance(); //得到右边的距离
-
- TIM_SetCompare2(TIM3, SG90_CENTRE);
- delay_ms(1000);
- if(left_distance > right_distance)
- {
- go_back();
- delay_ms(600);
- ture_left();
- delay_ms(300);
- }
- else
- {
- go_back();
- delay_ms(600);
- ture_right();
- delay_ms(300);
- }
- }
- else
- {
- go_straight();
- }
-
- }
- }
-
注:工程源码的模板参考正点原子stm32f103系列标准库版。





