
- 1在无GUI环境下(headless模式)配置并使用Python+selenium+chromium/firefox的流程_selenium+headless firefox 需要下载firefox吗?
- 2ONLYOFFICE:兼顾协作与安全的开源办公套件
- 3[Python从零到壹] 五十九.图像增强及运算篇之图像锐化Scharr、Canny、LOG实现边缘检测_图像使用canny使得增强后的图像
- 4微信小程序---缓慢展开和收起效果(不需要wx:if控制实现)_微信小程序点击展开效果动画
- 5*++p、++*p、(*p)++、*(p++)、*p++的区别
- 6Spring Boot 笔记 012 创建接口_添加文章分类
- 7sklearn中的聚类算法K-Means_sklearn kmeans
- 8midjourney指令笔记+踩坑日记+gpt论文润色指令_mj 提示:--stylize must be between 1250 and 5000 with
- 9EXCEL数据分析的基本知识_excel画图叫什么分析
- 10基于nodejs+vue地方特色的风景文化宣传网站vscode_前端地区宣传网页
嵌入式stm32智能小车总结_嵌入式小车红外感应
赞
踩
STM32智能小车设计报告
- 原理图概述
作为智能小车,最基本的一点肯定是解决电机驱动的问题。
现在市场上有许多适合小车电机驱动的模块,常见的有L298N、L9110S、DRV8833、TB6612等。这些芯片/模块各有优劣,但是控制原理和方法基本相似。这些芯片/模块的详细介绍可以参照第二章系统硬件设计,将详细地介绍上述几个芯片/模块的重要参数以及使用方法。
电机驱动解决后,接下来就是超声波模块。超声波配合舵机,可以轻松实现避障,使得小车看上去更加智能。
本设计主将以stm32为核心,配合电机驱动、舵机和超声波模块,实现小车的自动避障功能。
- 系统硬件设计
本设计采用STM32F103C8T6作为处理器,DS18B20作为温度传感器,L298N作为直流电机驱动模块。小车采用3个轮子,每个轮子都有独立的电机驱动。小车的控制部分由遥控器和智能小车组成
1.循迹传感器模块
循迹传感器采用红外线传感器,用来检测小车所行进的轨迹,并将检测到的数据进行处理。本设计共选择5个红外传感器,以便实现对小车的全方位控制。
2.MCU模块
STM32F103C8T6处理器作为小车的控制核心,支持多种外设和接口,能够很好地满足小车控制系统的各种要求。处理器采用板载外部晶体振荡器,稳定性好,运行速度快,具有高性能、低功耗的优势。
3.遥控器模块
遥控器通过按键将命令传输到智能小车中,采用LORA进行数据传输,具有远距离传输、抗干扰、低功耗等优点。
4.电机驱动模块
为了控制小车的运动,本设计采用L298N模块作为直流电机驱动模块。 L298N模块具有高性能、高效、低功耗等优点,可以很好地满足小车的驱动需求。
5.电池模块
电池模块作为小车的能量来源,同时也是系统运行的保障。小车采用6V电池供电。
- 系统软件设计
本设计主要分为两个部分,一个是小车循迹功能的实现,另一个是小车遥控功能的实现。
1循迹功能实现
循迹功能的实现可以看做是对小车方向的控制,对于小车在不同的路段,需要采用不同的控制方法。当小车行驶在直线路段时,可以通过红外传感器获取到车子前方的狭缝数据。当中间传感器检测到狭缝时,意味着小车正沿着中线行驶,此时,小车不需要进行任何的方向调整。如果小车行驶在弯曲路段,红外传感器会检测到两条黑线。我们可以通过检测左右两边的传感器数据,来确定小车需要向哪个方向方向调整,具体步骤如下:
(1)检测两侧传感器数据(左右传感器数据)
(2)根据数据计算出偏差值
(3)根据偏差值控制电机运动
2 遥控功能实现
遥控功能实现主要功能是将遥控器的命令传输到小车中,并对小车进行控制。遥控器主要通过LORA模块进行数据传输,下面我们详细介绍下遥控功能的实现。
(1)遥控器发送数据
遥控器主要通过LORA模块发送命令给小车,例如前进、后退、左转、右转等。发送完成后等待小车的响应,如果没有响应,则重新发送。
(2)小车接收数据
小车采用STM32F103C8T6作为处理器,LORA模块负责接收遥控器发来的数据。接收完成后,根据命令进行相应的动作。
硬件组装展示
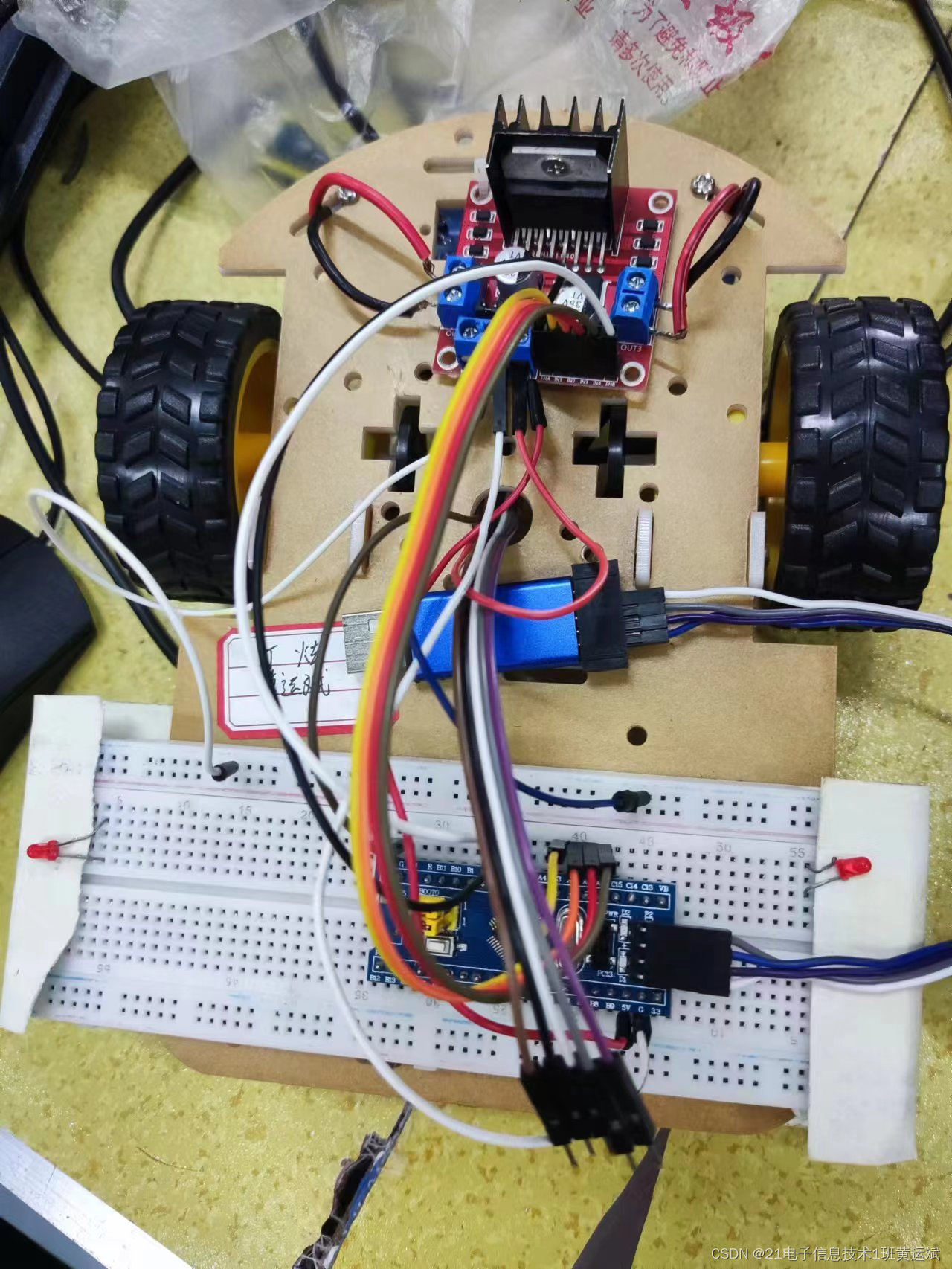
- 结论
本设计基于STM32F103C8T6处理器,使用L298N电机驱动模块实现了智能小车的循迹和遥控功能。通过循迹模块可以使小车沿着预定路线行驶,并支持在不同路面进行自动调整,遥控功能可以方便地实现对小车的控制,整体实现效果比较理想。
5.视频展示
VID_20231018_174731





