
- 1维金细说“virtualization”_全虚拟化 半虚拟化 硬件辅助虚拟化
- 2SpringCloud与SpringBoot的版本对应关系(2022年最新)
- 3嵌入式学习-uboot-lesson3-6410uboot启动流程分析_6410 mmu uboot
- 4三层交换机如何配置?如何实现不同vlan间的通信?_在bgp传递vlan10,vlan20,vlan30,vlan40的路由信息。
- 5基于rt-thread的udp客户端_rtthread udp
- 6原生微信小程序,navigate(导航栏)组件_$navigate
- 7【简记】virt-manager查看虚拟机详情出现报错:启动详情报错:‘NoneType’ object has no attribute 'change_run_text'...
- 8阿里云ECS搭建nginx服务器_阿里云esc安装web服务器(如nginx),实现文件上传和下载的功能
- 9spark和python的关系_spark程序与参数的关系
- 10从零到一快速搭建个人博客网站(域名备案 + https免费证书)(一)_个人博客需要备案吗
基于STM32的智能小车(蓝牙遥控 自动避障)_stm32避障小车任务书
赞
踩
目录
前言
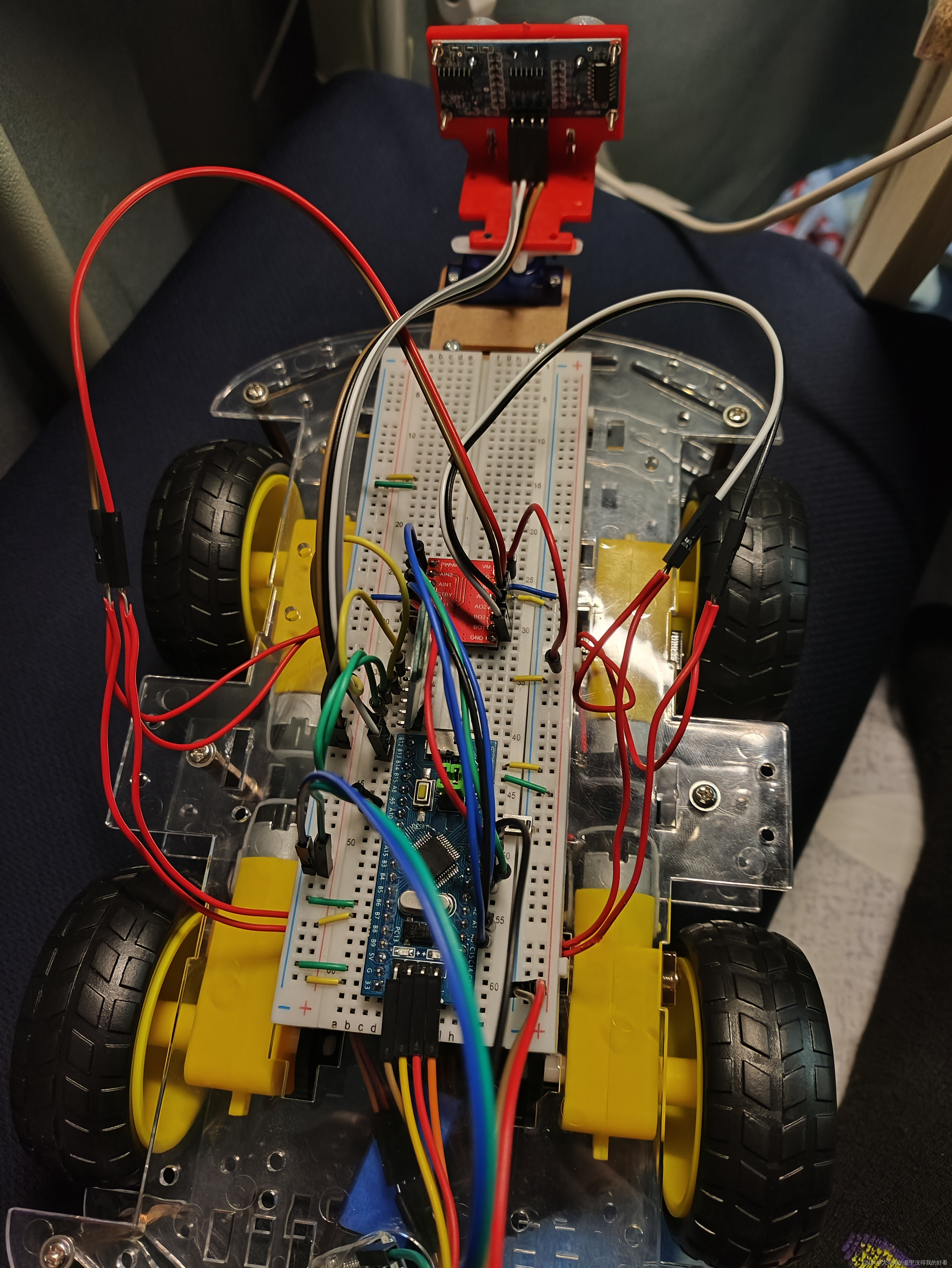
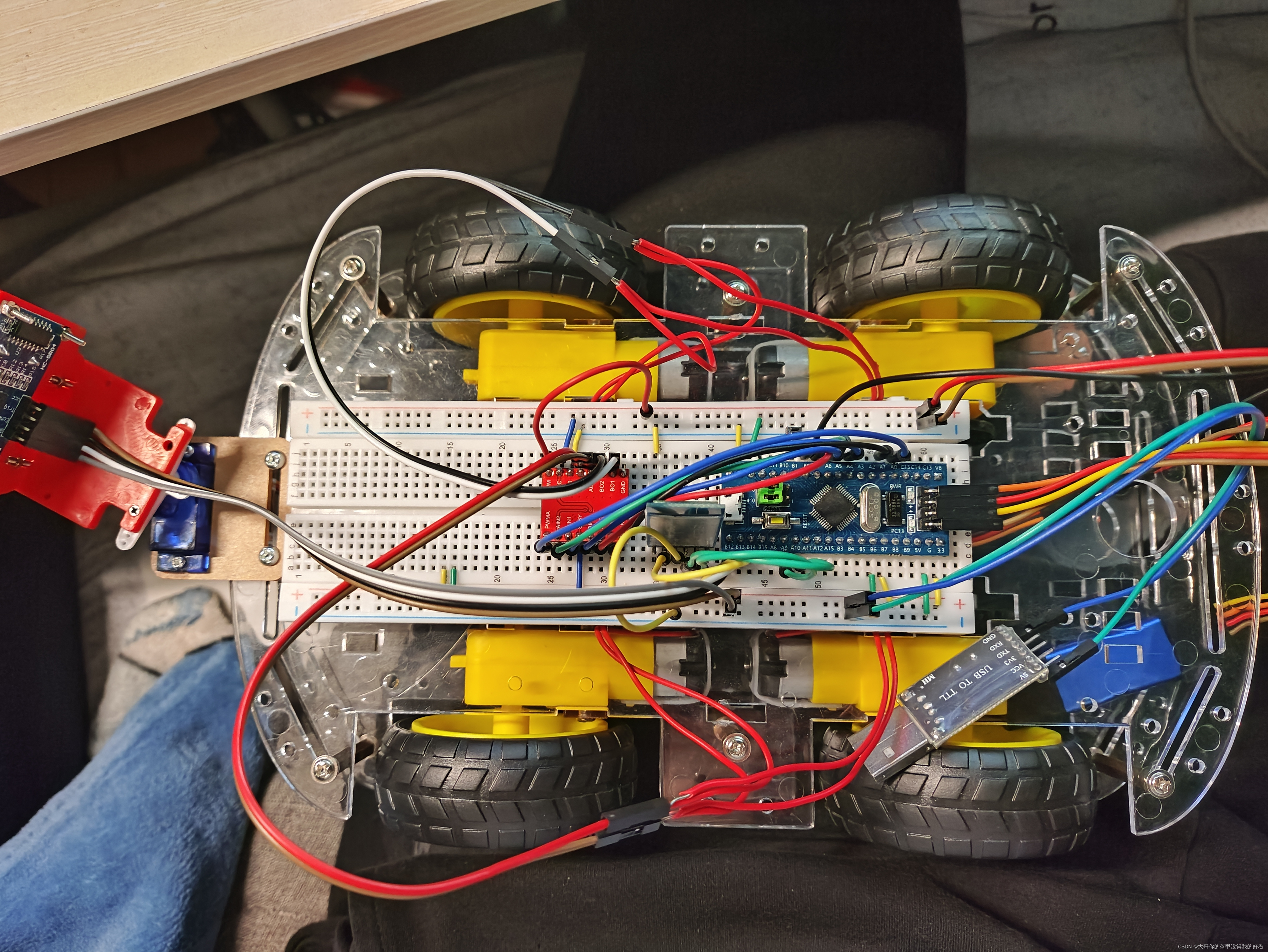
学完江科大的stm32 就迫不及待想找个项目练练手,于是就先做了一个比较基础的智能小车项目,没有去设计板子,直接用的江科大的面包板做的一个简易的小车。这个过程还是遇到了一些困难,下面我以一个小白的视角把我自己遇到的问题分享出来供大家参考,编程全部采用模块化编程,可以随意拓展自己喜欢的功能
配置清单
- STM32C8T6核心板
- 小车底盘4WD(拼多多上面购买 会送4个电机)
- HC-SR04超声波测距模块
- sg舵机
- TB6612电机驱动模块
- HC-05蓝牙串口透穿模块
- 4节五号电池
代码实现
1.TB6612驱动4路电机
一个tb6612上面的接口只能驱动2个电机,,这里采用了串联的方式实现驱动4个电机转动,AO1、AO2、BO2、BO1分贝引出两根线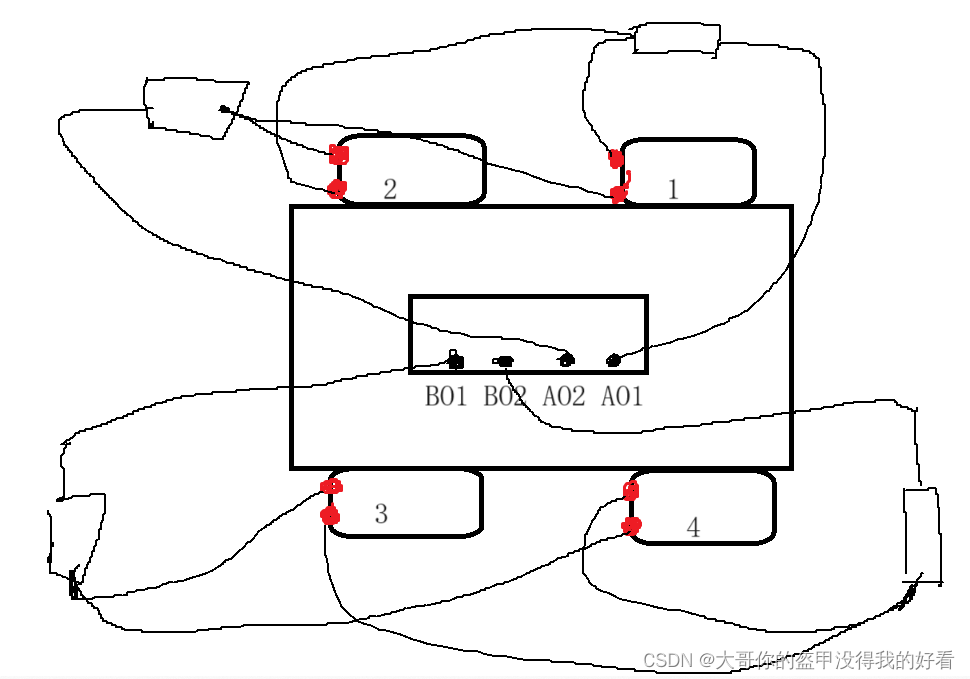

电机驱动代码(Motor.c)
- #include "stm32f10x.h" // Device header
- #include "PWM.h"
-
- void MotorAll_Init(void)
- {
- //开启电机驱动口的四个GPIO口
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5|GPIO_Pin_6| GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- PWM_Init();
- }
- //当IN1和IN2之间有电压差,即一个为1,一个为0时,电机转动
- void MotorR_SetSpeed(int8_t Speed) //右轮
- {
- if (Speed >= 0) //正转
- {
- GPIO_ResetBits(GPIOA, GPIO_Pin_4); //低
- GPIO_SetBits(GPIOA, GPIO_Pin_5); //高
- PWM_SetCompare1(Speed);
- }
- else
- {
- GPIO_SetBits(GPIOA, GPIO_Pin_4); //高
- GPIO_ResetBits(GPIOA, GPIO_Pin_5); //低
- PWM_SetCompare1(-Speed);
- }
- }
-
- void MotorL_SetSpeed(int8_t Speed) //左轮
- {
- if (Speed >= 0)
- {
- GPIO_SetBits(GPIOA, GPIO_Pin_6);
- GPIO_ResetBits(GPIOA, GPIO_Pin_7);
- PWM_SetCompare2(Speed);
- }
- else
- {
- GPIO_ResetBits(GPIOA, GPIO_Pin_6);
- GPIO_SetBits(GPIOA, GPIO_Pin_7);
-
- PWM_SetCompare2(-Speed);
- }
- }
-

利用pwm控制电机速度(PWM.c)
- #include "stm32f10x.h" // Device header
-
- void PWM_Init(void)
- {
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- TIM_InternalClockConfig(TIM2);
-
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
- TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
-
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- TIM_OCStructInit(&TIM_OCInitStructure);
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = 0; //CCR
- //PWM接口的占空比越大,速度越小
- TIM_OC1Init(TIM2, &TIM_OCInitStructure); //设置PWM通道的占空比
- TIM_OC2Init(TIM2, &TIM_OCInitStructure);
-
-
- TIM_Cmd(TIM2, ENABLE);
- }
-
- void PWM_SetCompare1(uint16_t Compare) //设置CCR寄存器的值
- {
- TIM_SetCompare1(TIM2, Compare);
- }
-
- void PWM_SetCompare2(uint16_t Compare)
- {
- TIM_SetCompare2(TIM2, Compare);
- }
-
-
-
2.蓝牙控制小车运动
搞这个蓝牙模块可是废了老大劲了,我买的电池电压不够,后面直接用usb转ttl直接插在充电宝上给stm32供电,一个新的蓝牙模块拿到手上必须先用串口连接电脑进入AT模式配置基本参数,修改密码和名字等等,具体步骤可以参考csdn,蓝牙模块的代码就是直接照搬江科大的串口通信代码,接线的时候,需要注意蓝牙模块的TX接口要接stm32的RX接口,反正如果上电发指令没反应就把A9和A10的接线换一下,若出现断连(即之前连接成功,但突然断开)情况,大概率是因为供电不足。手机上的蓝牙软件很多应用商店搜一下就有了调试全能王、蓝牙调试器。。。。。
(Serial.c)
- #include "stm32f10x.h" // Device header
- #include <stdio.h>
- #include <stdarg.h>
-
- uint8_t Serial_RxData;
- uint8_t Serial_RxFlag;
-
- void Serial_Init(void)
- {
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //串口端口使能
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //GPIO端口使能
- //初始化GPIO引脚
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //TX
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA,&GPIO_InitStructure); //(初始化GPIOA外设,结构体变量名 使用值传递)
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //RX
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA,&GPIO_InitStructure); //(初始化GPIOA外设,结构体变量名 使用值传递)
-
- //初始化USART
- USART_InitTypeDef USART_InitStructure;
- USART_InitStructure.USART_BaudRate = 9600; //波特率
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制 无流控
- USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //串口模式 TX——发送模式 Rx——接收模式
- USART_InitStructure.USART_Parity = USART_Parity_No; //校验位
- USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位
- USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长
- USART_Init(USART1, &USART_InitStructure);
- // 开启中断
- USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
-
- NVIC_InitTypeDef NVIC_InitStructure;
- NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
- NVIC_Init(&NVIC_InitStructure);
-
- USART_Cmd(USART1, ENABLE);
- }
- //发送数据的函数
- void Serial_SendByte(uint8_t Byte)
- {
- USART_SendData(USART1, Byte);
- while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
- }
- //发送数组的函数
- void Serial_SendArray(uint8_t *Array, uint16_t Length) //传递数组需要使用指针
- {
- uint16_t i;
- for (i = 0; i < Length; i ++)
- {
- Serial_SendByte(Array[i]);
- }
- }
- //发送字符串
- void Serial_SendString(char *String)
- {
- uint8_t i;
- for (i = 0; String[i] != '\0'; i ++)
- {
- Serial_SendByte(String[i]);
- }
- }
- //次方函数
- uint32_t Serial_Pow(uint32_t X, uint32_t Y)
- {
- //X 的 Y 次方
- uint32_t Result = 1;
- while (Y --)
- {
- Result *= X;
- }
- return Result;
- }
- //发送一个数字
- //把数字各个位数以十进制拆开
- void Serial_SendNumber(uint32_t Number, uint8_t Length)
- {
- uint8_t i;
- for (i = 0; i < Length; i ++)
- {
- Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //参数以十进制从高位到低位依次发送
- }
- }
- // 移植printf函数
- int fputc(int ch,FILE *f)
- {
- Serial_SendByte(ch);
- return ch;
- }
- //读后自动清除
- uint8_t Serial_GetRxFlag(void)
- {
- if (Serial_RxFlag == 1)
- {
- Serial_RxFlag = 0;
- return 1;
- }
- return 0;
- }
- uint8_t Serial_GetRxData(void)
- {
- return Serial_RxData;
- }
-
-
-
封装车子的运动代码(Car.c)
- #include "stm32f10x.h" // Device header
- #include "Motor.h"
-
- void Car_Init()
- {
- MotorAll_Init();
- }
-
- void Go_Ahead() //前进
- {
- MotorR_SetSpeed(100);
- MotorL_SetSpeed(100);
- }
- void Go_Back() //后退
- {
- MotorR_SetSpeed(-100);
- MotorL_SetSpeed(-100);
- }
- void Turn_Left() //左转
- {
- MotorR_SetSpeed(100);
- MotorL_SetSpeed(0);
- }
- void Turn_Right() //右转
- {
- MotorR_SetSpeed(0);
- MotorL_SetSpeed(100);
- }
- void Self_Left() //原地向左自转
- {
- MotorR_SetSpeed(100);
- MotorL_SetSpeed(-100);
- }
- void Self_Right() //原地向左自转
- {
- MotorR_SetSpeed(-100);
- MotorL_SetSpeed(100);
- }
- void Car_Stop() //停车
- {
- MotorR_SetSpeed(0);
- MotorL_SetSpeed(0);
- }
3.舵机旋转
这里也会用到pwm控制我们单独再写一个和前面控制小车速度的pwm分开,前面用的定时器2,这个就用定时器3
(PWMServo.c)
- #include "stm32f10x.h" // Device header
-
- void PWM_Init2(void)
- {
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- TIM_InternalClockConfig(TIM3);
-
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR
- TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
-
- TIM_OCInitTypeDef TIM_OCInitStructure;
- TIM_OCStructInit(&TIM_OCInitStructure);
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = 0; //CCR
- TIM_OC3Init(TIM3, &TIM_OCInitStructure);
- TIM_Cmd(TIM3, ENABLE);
- }
-
- void PWM_2SetCompare3(uint16_t Compare)
- {
- TIM_SetCompare3(TIM3, Compare);
- }
舵机控制代码(Servo.c),这些代码江科大视频里面都讲得很清楚,这里就不在叙述了
- #include "stm32f10x.h" // Device header
- #include "PWMServo.h"
-
- void Servo_Init(void)
- {
- PWM_Init2();
- }
- // 0度 500
- // 180度 2500
- void Servo_SetAngle(float Angle) //舵机设置角度
- {
- PWM_2SetCompare3(Angle/180*2000+500);
- }
4.超声波测距模块
超声波和舵机要搭配使用,需要自己去淘宝购买支架将他们组装起来,这2个外设是实现小车自动避障功能的
超声波代码(Ultrasound.c)
- #include "stm32f10x.h" // Device header
- #include "Delay.h"
-
- uint16_t Cnt;
- uint16_t OverCnt;
- void Ultrasound_Init(){
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
-
- GPIO_InitTypeDef GPIO_InitStructure;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//trig
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;//echo
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- TIM_InternalClockConfig(TIM4);
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_Period = 60000 - 1; //ARR
- TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
- TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);
-
- }
- float Test_Distance(){
- GPIO_SetBits(GPIOB,GPIO_Pin_12);
- Delay_us(20);
- GPIO_ResetBits(GPIOB,GPIO_Pin_12);
- while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13)==RESET){
- };
- TIM_Cmd(TIM4, ENABLE);
- while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13)==SET){
- };
- TIM_Cmd(TIM4, DISABLE);
- Cnt=TIM_GetCounter(TIM4);
- float distance=(Cnt*1.0/10*0.34)/2;
- TIM4->CNT=0;
- Delay_ms(100);
- return distance;
- }
自动避障代码(Auto.h)
- #include "stm32f10x.h" // Device header
- #include "Car.h"
- #include "Servo.h"
- #include "Delay.h"
- #include "Ultrasound.h"
- #include "Serial.h"
- //×Ô¶¯±ÜÕÏÄ£¿é
- void Auto()
- {
- uint16_t a = Test_Distance();
- Serial_SendString("Obstacle distance ");
- Serial_SendNumber(a,3);
- Serial_SendString("cm\n");
- if(a<15){
- Car_Stop();
- Servo_SetAngle(0); //舵机朝右边转一下
- Delay_ms(1000); //延长1s
- uint16_t b= Test_Distance(); //测试右边的距离
- Serial_SendString("Obstacle distance ");
- Serial_SendNumber(b,3);
- Serial_SendString("cm\n");
- if(b>15){
- Servo_SetAngle(130); //让超声波探头正式前方
- Delay_ms(1000);
- Self_Right();
- Delay_ms(1500);
- Go_Ahead();
-
- }
- else {
- Servo_SetAngle(180); //舵机朝左边转一下
- Delay_ms(1000);
- uint16_t c= Test_Distance(); //测试左边的距离
- Serial_SendString("Obstacle distance ");
- Serial_SendNumber(c,3);
- Serial_SendString("cm\n");
- if(c>15){
- Servo_SetAngle(130);
- Delay_ms(1000);
- Self_Left();
- Delay_ms(1500);
- Go_Ahead();
- }else{
- Servo_SetAngle(130);
- Go_Back();
- Delay_ms(3000);
- Self_Right();
- Delay_ms(1500);
- Go_Ahead();
- }
- }
- }
- Delay_ms(100); //每隔100ms测试一次距离
- }
5.主函数
在手机蓝牙APP里面发送相应指令车子就能做出动作 ,比如发送31车子就会前进。。。
- #include "stm32f10x.h" // Device header
- #include "Delay.h"
- #include "OLED.h"
- #include "Motor.h"
- #include "Car.h"
- #include "Serial.h"
- #include "Key.h"
- #include "Servo.h"
- #include "Ultrasound.h"
- #include "Auto.h"
-
- uint16_t Data1;
-
- int main(void)
- {
- Car_Init();
- Serial_Init(); //蓝牙通信初始化
- Servo_Init(); //舵机
- Servo_SetAngle(130); //让超声波测距探头正视前方
- Ultrasound_Init(); //超声波测距模块初始化
- while(1)
- {
- Auto(); //自动避障
- }
- }
-
- //蓝牙通信中断函数
- void USART1_IRQHandler(void)
- {
- if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
- {
- Data1 = USART_ReceiveData(USART1);
- if(Data1 == 0x30)
- Car_Stop();
- if(Data1 == 0x31)
- Go_Ahead();
- if(Data1 == 0x32)
- Go_Back();
- if(Data1 == 0x33)
- Turn_Left();
- if(Data1 == 0x34)
- Turn_Right();
- if(Data1 == 0x35)
- Self_Left();
- if(Data1 == 0x36)
- Self_Right();
- if(Data1 == 0x37)
- Servo_SetAngle(0);
- if(Data1 == 0x38)
- Servo_SetAngle(90);
- if(Data1 == 0x39)
- Servo_SetAngle(180);
- USART_ClearITPendingBit(USART1, USART_IT_RXNE);
- }
- }
接线图
舵机的 橙色线 接 B0 红色正极,棕色负极
TB6612电机驱动模块 PWMA-A0、AIN2-A5、AIN1-A4、STBY-正极、BIN1-A6、BIN2-A7、PWMB-A1、VM-正极、VCC-正极、GND-负极
HC-05蓝牙模块 RX-A9 TX-A10
超声波测距模块 trig-B12 echo-B13
电源-随便接在面包板正负极就行 注意:先用一些短线把面包板的正负极和最小系统板连通
总结
小车只实现了一些简单的功能,学完江科大的视频就能上手,如果还有疑问可以 看看这个视频,如果有需要改进优化的地方还请求大家积极指出![]()
智能小车制作教程(基于stm32)_哔哩哔哩_bilibili![]() https://www.bilibili.com/video/BV1yM4y1J78r/?spm_id_from=333.1007.top_right_bar_window_custom_collection.content.click&vd_source=0ca4e898b61a53eea12c3cbc258a5551
https://www.bilibili.com/video/BV1yM4y1J78r/?spm_id_from=333.1007.top_right_bar_window_custom_collection.content.click&vd_source=0ca4e898b61a53eea12c3cbc258a5551
完整代码:链接:https://pan.baidu.com/s/1gSStigM8D4tBkC2i17q6RA?pwd=abcd
提取码:abcd





