
热门标签
热门文章
- 1STM32 开发常见问题汇总_stm32 开发的时候遇到的问题
- 2Linux之基础指令大全【痛苦的开始】
- 3C++常见的质数判断算法_c++判断质数
- 4【目标检测】Flask+Docker在服务器部署YOLOv5应用
- 5【32单片机学习】(11)STM32启动过程详解_stm32g0系列的启动配置
- 6【uni-app】 动态设置 tabBar_uniapp动态设置tabbar
- 7记录:初学者如何安装gdal、rasterio、geopandas(中秋快乐(超大声)_rasterio和geopandas兼容版本
- 8安装spacy+zh_core_web_sm避坑指南
- 9Java刷力扣技巧总结-思想与技巧_力扣怎么刷java题
- 10【ACDC数据集】:预处理ACDC心脏3D MRI影像数据集到VOC数据集格式,nii转为jpg,label转为png
当前位置: article > 正文
YOLOV8目标识别与语义分割——使用OpenCV C++ 推理模型_opencv 可以推理yolo v8 吗
作者:编程领航者 | 2024-01-29 22:41:53
赞
踩
opencv 可以推理yolo v8 吗
简介
深度学习在实际应用中包括训练和推理两个重要阶段,通常依赖于流行的深度学习框架,如Caffe、TensorFlow、PyTorch等。然而,这些框架的安装和配置往往复杂,在实际部署中可能面临一些挑战。
自从OpenCV 3.3版本起,引入了DNN模块,为用户提供了一种更加简便的方式进行深度学习推理。使用OpenCV的DNN接口,用户可以无需安装额外的依赖,直接在正常安装OpenCV的基础上,使用经过训练的深度学习模型进行推理计算,从而简化了深度学习模型的部署过程。这为开发者提供了更方便、更轻量级的选择,使得在实际应用中更容易集成深度学习技术。
推理环境
当前使用的环境是OpenCV4.7 带dnn模块,YoloV8的推理目前只支持opencv4.7.0及其以上的版本,而目前opencv4.7.0的版本有问题,如果推理CPU不支持AVX2指令集,则需要在net.forward() 前面加上net.enableWinograd(false);来关闭Winograd加速,关于这个问题可以参考这个issue .
模型转换
安装环境:
conda create -n yolov8 python=3.8
activate ylolv8
pip install ultralytics
- 1
- 2
- 3
模型转换:
使用以下命令将YOLO模型从PyTorch导出为ONNX格式,并设置opset为12:
yolo export model=yolov8s.pt format=onnx dynamic=False opset=12
- 1
此命令的含义解释如下:
yolo export: 使用YOLO导出功能model=yolov8s.pt: 指定PyTorch模型的路径format=onnx: 导出为ONNX格式dynamic=False: 关闭动态输入opset=12: 设置ONNX模型的opset版本为12
推理代码
1.目标识别
#include "YoloV8Detect.h" YoloV8Detect::YoloV8Detect() { } bool YoloV8Detect::detect(cv::Mat& cv_src,std::vector<OutputSeg>& output) { cv::Mat blob; output.clear(); int col = cv_src.cols; int row = cv_src.rows; cv::Mat net_input_img; cv::Vec4d params; LetterBox(cv_src, net_input_img, params, cv::Size(_net_width, _net_height)); cv::dnn::blobFromImage(net_input_img, blob, 1 / 255.0, cv::Size(_net_width, _net_height), cv::Scalar(0, 0, 0), true, false); _net.setInput(blob); std::vector<cv::Mat> net_output_img; _net.forward(net_output_img, _net.getUnconnectedOutLayersNames()); //get outputs std::vector<int> class_ids;// res-class_id std::vector<float> confidences;// res-conf std::vector<cv::Rect> boxes;// res-box cv::Mat output0 = cv::Mat(cv::Size(net_output_img[0].size[2], net_output_img[0].size[1]), CV_32F, (float*)net_output_img[0].data).t(); //[bs,116,8400]=>[bs,8400,116] int net_width = output0.cols; int rows = output0.rows; float* pdata = (float*)output0.data; for (int r = 0; r < rows; ++r) { cv::Mat scores(1, _class_name.size(), CV_32FC1, pdata + 4); cv::Point class_id_point; double max_class_socre; minMaxLoc(scores, 0, &max_class_socre, 0, &class_id_point); max_class_socre = (float)max_class_socre; if (max_class_socre >= _class_threshold) { //rect [x,y,w,h] float x = (pdata[0] - params[2]) / params[0]; float y = (pdata[1] - params[3]) / params[1]; float w = pdata[2] / params[0]; float h = pdata[3] / params[1]; int left = MAX(int(x - 0.5 * w + 0.5), 0); int top = MAX(int(y - 0.5 * h + 0.5), 0); class_ids.push_back(class_id_point.x); confidences.push_back(max_class_socre); boxes.push_back(cv::Rect(left, top, int(w + 0.5), int(h + 0.5))); } pdata += net_width;//next line } //NMS std::vector<int> nms_result; cv::dnn::NMSBoxes(boxes, confidences, _class_threshold, _nms_threshold, nms_result); std::vector<std::vector<float>> temp_mask_proposals; cv::Rect holeImgRect(0, 0, cv_src.cols, cv_src.rows); for (int i = 0; i < nms_result.size(); ++i) { int idx = nms_result[i]; OutputSeg result; result.id = class_ids[idx]; result.confidence = confidences[idx]; result.box = boxes[idx] & holeImgRect; output.push_back(result); } if (output.size()) return true; else return false; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
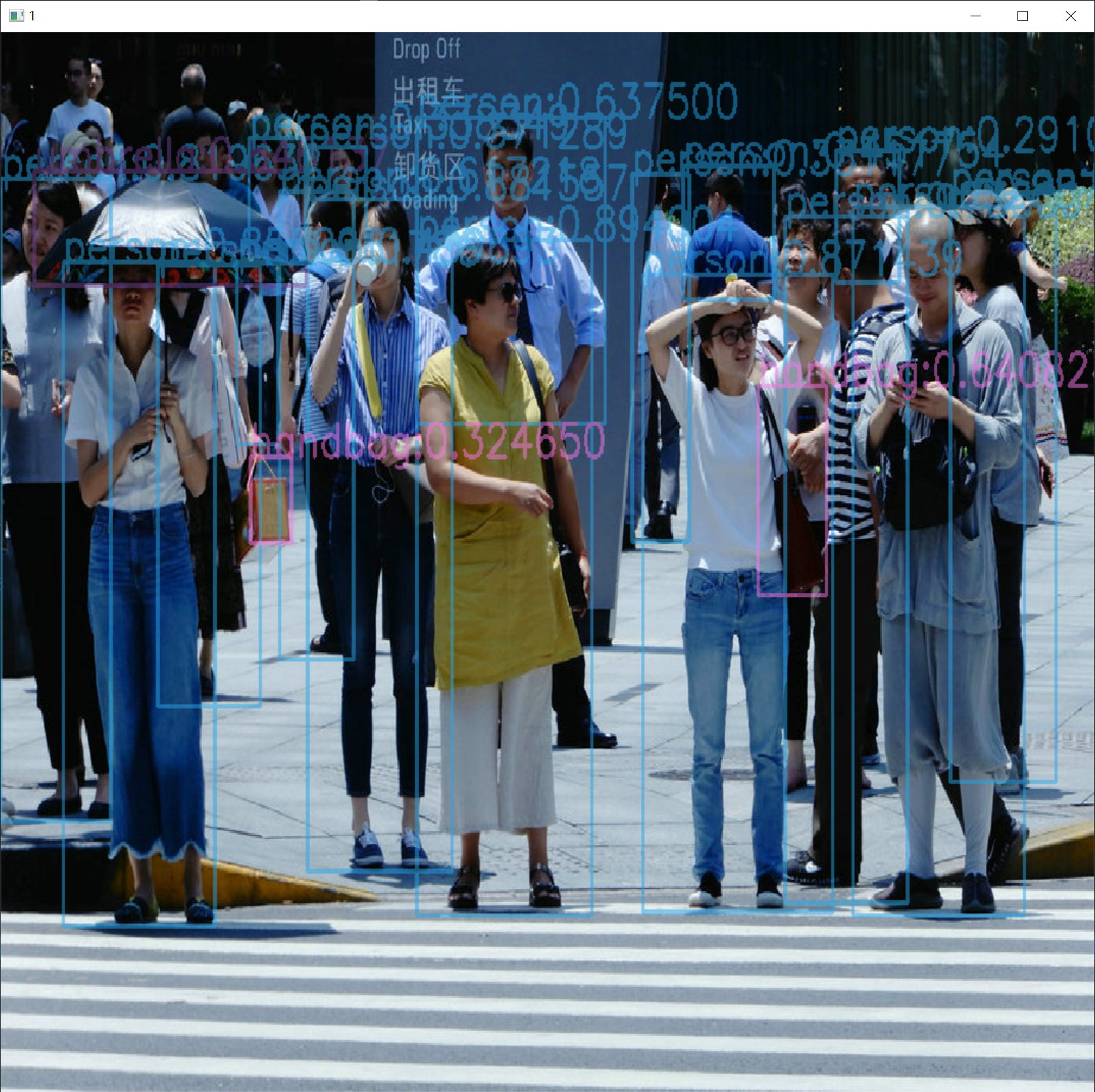
识别结果:
2.语义分割
#include "YoloV8Seg.h" bool YoloV8Seg::segmentation(cv::Mat& cv_src, std::vector<OutputSeg>& output) { cv::Mat blob; output.clear(); int col = cv_src.cols; int row = cv_src.rows; cv::Mat netInputImg; cv::Vec4d params; LetterBox(cv_src, netInputImg, params, cv::Size(_net_width, _net_height)); cv::dnn::blobFromImage(netInputImg, blob, 1 / 255.0, cv::Size(_net_width, _net_height), cv::Scalar(0, 0, 0), true, false); _net.setInput(blob); std::vector<cv::Mat> net_output_img; std::vector<std::string> output_layer_names{ "output0","output1" }; _net.forward(net_output_img, output_layer_names); //get outputs std::vector<int> class_ids;// res-class_id std::vector<float> confidences;// res-conf std::vector<cv::Rect> boxes;// res-box std::vector<std::vector<float>> picked_proposals; cv::Mat output0 = cv::Mat(cv::Size(net_output_img[0].size[2], net_output_img[0].size[1]), CV_32F, (float*)net_output_img[0].data).t(); int rows = output0.rows; int net_width = output0.cols; float* pdata = (float*)output0.data; for (int r = 0; r < rows; ++r) { cv::Mat scores(1, _class_name.size(), CV_32FC1, pdata + 4); cv::Point class_id_point; double max_class_socre; minMaxLoc(scores, 0, &max_class_socre, 0, &class_id_point); max_class_socre = (float)max_class_socre; if (max_class_socre >= _classThreshold) { std::vector<float> temp_proto(pdata + 4 + _class_name.size(), pdata + net_width); picked_proposals.push_back(temp_proto); //rect [x,y,w,h] float x = (pdata[0] - params[2]) / params[0]; float y = (pdata[1] - params[3]) / params[1]; float w = pdata[2] / params[0]; float h = pdata[3] / params[1]; int left = MAX(int(x - 0.5 * w + 0.5), 0); int top = MAX(int(y - 0.5 * h + 0.5), 0); class_ids.push_back(class_id_point.x); confidences.push_back(max_class_socre); boxes.push_back(cv::Rect(left, top, int(w + 0.5), int(h + 0.5))); } pdata += net_width;//next line } //NMS std::vector<int> nms_result; cv::dnn::NMSBoxes(boxes, confidences, _classThreshold, _nmsThreshold, nms_result); std::vector<std::vector<float>> temp_mask_proposals; cv::Rect holeImgRect(0, 0, cv_src.cols, cv_src.rows); for (int i = 0; i < nms_result.size(); ++i) { int idx = nms_result[i]; OutputSeg result; result.id = class_ids[idx]; result.confidence = confidences[idx]; result.box = boxes[idx] & holeImgRect; temp_mask_proposals.push_back(picked_proposals[idx]); output.push_back(result); } MaskParams mask_params; mask_params.params = params; mask_params.srcImgShape = cv_src.size(); mask_params.netHeight = _net_height; mask_params.netWidth = _net_width; mask_params.maskThreshold = _maskThreshold; for (int i = 0; i < temp_mask_proposals.size(); ++i) { GetMask2(cv::Mat(temp_mask_proposals[i]).t(), net_output_img[1], output[i], mask_params); } if (output.size()) return true; else return false; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
推理结果:

报错
ONNX file: yolov8n.onnx in function ‘cv::dnn::dnn4_v20221220::ONNXImporter::ONNXImporter‘,报这个错是模型转换的问题或者是opencv版本的问题。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/45459
推荐阅读



相关标签

