
智能部署之巅:Amazon SageMaker引领机器学习革新
赞
踩
本篇文章授权活动官方亚马逊云科技文章转发、改写权,包括不限于在 亚马逊云科技开发者社区, 知乎,自媒体平台,第三方开发者媒体等亚马逊云科技官方渠道。
(全球TMT2023年12月6日讯)亚马逊云科技在2023 re:Invent全球大会上,宣布推出五项Amazon SageMaker新功能,帮助客户加速构建、训练和部署大语言模型和其他基础模型。自2017年推出以来,Amazon SageMaker已经新增了380多个功能和特性,为客户提供了规模化构建、训练和部署可投入生产的大规模模型所需的一切。
其中包括了一项新功能,进一步增强了Amazon SageMaker的模型扩展能力并加速了模型的训练。此外,Amazon SageMaker推出的另一项新功能,能够通过降低模型部署成本和延迟时间,优化了管理托管的机器学习基础设施。亚马逊云科技还推出了新的SageMaker Clarify功能,可以让客户在负责任地使用AI的基础上,根据质量参数更轻松地选择正确模型。为了帮助客户在企业范围内应用这些模型,亚马逊云科技还在Amazon SageMaker Canvas中引入了新的无代码功能,让客户更快、更容易地使用自然语言指令准备数据。同时,Amazon SageMaker Canvas继续推动模型构建和定制的普及,让客户更轻松地使用模型提取洞察、进行预测和使用企业专有数据生成内容。这些创新均基于Amazon SageMaker丰富的功能,帮助客户实现规模化机器学习创新。
1. 模型训练速度和效果
一些测评显示,Amazon SageMaker在模型训练方面表现出色。其支持分布式训练,利用弹性计算资源,能够显著缩短训练时间。用户可以选择使用内置算法或自定义脚本,根据实际需求选择合适的训练方式。此外,自动模型调优功能可以帮助用户优化模型性能,提高训练效果。
2. 部署和管理的便捷性
Amazon SageMaker提供了简单而强大的模型部署功能。它支持一键式部署,并提供实时和离线推理选项,适用于不同的应用场景。此外,SageMaker Studio作为一体化的集成开发环境,为用户提供了方便的模型管理和监控工具,使整个部署和管理过程更加便捷。
SageMaker pytorch Mnist
SageMaker与Kubeflow一个区别就在于:
在Kubeflow中,我们可以为管道内各组件挂载相同PV卷,使其运行在同一文件系统环境下,或者像Elyra,为整个Pipeline配置一个Minio的Bucket,作为共同的文件系统工作环境;
在SageMaker里,我们会建立一个会话,并设置默认存储桶Bucket,之后将要用于模型训练的数据集上传至该存储桶中;
下载、转化并上传数据至S3
为当前 SageMaker 会话设置默认 S3 存储桶 URI,创建一个新文件夹prefix,然后将数据集上传至该文件夹下。
import sagemaker sagemaker_session = sagemaker.Session() bucket = sagemaker_session.default_bucket() prefix = "sagemaker/DEMO-pytorch-mnist" role = sagemaker.get_execution_role() ### 下载数据 from torchvision.datasets import MNIST from torchvision import transforms MNIST.mirrors = ["https://sagemaker-sample-files.s3.amazonaws.com/datasets/image/MNIST/"] MNIST( "data", download=True, transform=transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))] ), ) ### 上传数据至Amazon S3 inputs = sagemaker_session.upload_data(path="data", bucket=bucket, key_prefix=prefix) print("input spec (in this case, just an S3 path): {}".format(inputs))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
训练模型脚本
和Kubeflow一样,准备一份可以直接运行的训练模型脚本:
### ------------------------ mnist.py -------------------------- # Based on https://github.com/pytorch/examples/blob/master/mnist/main.py import argparse import json import logging import os import sys import torch import torch.distributed as dist import torch.nn as nn import torch.nn.functional as F import torch.optim as optim import torch.utils.data import torch.utils.data.distributed from torchvision import datasets, transforms logger = logging.getLogger(__name__) logger.setLevel(logging.DEBUG) logger.addHandler(logging.StreamHandler(sys.stdout)) class Net(nn.Module): def __init__(self): ... def forward(self, x): ... def _get_train_data_loader(batch_size, training_dir, is_distributed, **kwargs): logger.info("Get train data loader") dataset = datasets.MNIST( training_dir, train=True, transform=transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))] ), ) train_sampler = ( torch.utils.data.distributed.DistributedSampler(dataset) if is_distributed else None ) return torch.utils.data.DataLoader( dataset, batch_size=batch_size, shuffle=train_sampler is None, sampler=train_sampler, **kwargs ) def _get_test_data_loader(test_batch_size, training_dir, **kwargs): logger.info("Get test data loader") return torch.utils.data.DataLoader( datasets.MNIST( training_dir, train=False, transform=transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))] ), ), batch_size=test_batch_size, shuffle=True, **kwargs ) def _average_gradients(model): # Gradient averaging. size = float(dist.get_world_size()) for param in model.parameters(): dist.all_reduce(param.grad.data, op=dist.reduce_op.SUM) param.grad.data /= size def train(args): is_distributed = len(args.hosts) > 1 and args.backend is not None logger.debug("Distributed training - {}".format(is_distributed)) use_cuda = args.num_gpus > 0 logger.debug("Number of gpus available - {}".format(args.num_gpus)) kwargs = {"num_workers": 1, "pin_memory": True} if use_cuda else {} device = torch.device("cuda" if use_cuda else "cpu") if is_distributed: # Initialize the distributed environment. world_size = len(args.hosts) os.environ["WORLD_SIZE"] = str(world_size) host_rank = args.hosts.index(args.current_host) os.environ["RANK"] = str(host_rank) dist.init_process_group(backend=args.backend, rank=host_rank, world_size=world_size) logger.info( "Initialized the distributed environment: '{}' backend on {} nodes. ".format( args.backend, dist.get_world_size() ) + "Current host rank is {}. Number of gpus: {}".format(dist.get_rank(), args.num_gpus) ) # set the seed for generating random numbers torch.manual_seed(args.seed) if use_cuda: torch.cuda.manual_seed(args.seed) train_loader = _get_train_data_loader(args.batch_size, args.data_dir, is_distributed, **kwargs) test_loader = _get_test_data_loader(args.test_batch_size, args.data_dir, **kwargs) logger.debug( "Processes {}/{} ({:.0f}%) of train data".format( len(train_loader.sampler), len(train_loader.dataset), 100.0 * len(train_loader.sampler) / len(train_loader.dataset), ) ) logger.debug( "Processes {}/{} ({:.0f}%) of test data".format( len(test_loader.sampler), len(test_loader.dataset), 100.0 * len(test_loader.sampler) / len(test_loader.dataset), ) ) model = Net().to(device) if is_distributed and use_cuda: # multi-machine multi-gpu case model = torch.nn.parallel.DistributedDataParallel(model) else: # single-machine multi-gpu case or single-machine or multi-machine cpu case model = torch.nn.DataParallel(model) optimizer = optim.SGD(model.parameters(), lr=args.lr, momentum=args.momentum) for epoch in range(1, args.epochs + 1): model.train() for batch_idx, (data, target) in enumerate(train_loader, 1): data, target = data.to(device), target.to(device) optimizer.zero_grad() output = model(data) loss = F.nll_loss(output, target) loss.backward() if is_distributed and not use_cuda: # average gradients manually for multi-machine cpu case only _average_gradients(model) optimizer.step() if batch_idx % args.log_interval == 0: logger.info( "Train Epoch: {} [{}/{} ({:.0f}%)] Loss: {:.6f}".format( epoch, batch_idx * len(data), len(train_loader.sampler), 100.0 * batch_idx / len(train_loader), loss.item(), ) ) test(model, test_loader, device) save_model(model, args.model_dir) def test(model, test_loader, device): model.eval() test_loss = 0 correct = 0 with torch.no_grad(): for data, target in test_loader: data, target = data.to(device), target.to(device) output = model(data) test_loss += F.nll_loss(output, target, size_average=False).item() # sum up batch loss pred = output.max(1, keepdim=True)[1] # get the index of the max log-probability correct += pred.eq(target.view_as(pred)).sum().item() test_loss /= len(test_loader.dataset) logger.info( "Test set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n".format( test_loss, correct, len(test_loader.dataset), 100.0 * correct / len(test_loader.dataset) ) ) # 当estimator.deploy时,需要显式定义出model_fn方法 def model_fn(model_dir): device = torch.device("cuda" if torch.cuda.is_available() else "cpu") model = torch.nn.DataParallel(Net()) with open(os.path.join(model_dir, "model.pth"), "rb") as f: model.load_state_dict(torch.load(f)) return model.to(device) # 部署函数的参数允许我们设置将用于端点的实例的数量和类型。这些值不需要与我们训练模型时设置的值相同。我们可以在一组基于 GPU 的实例上训练模型,然后在终端上部署基于CPU的模型实例;但这需要我们确保将模型返回或另存为 CPU 模型 # 因此,建议将模型返回或另存为CPU模型 def save_model(model, model_dir): logger.info("Saving the model.") path = os.path.join(model_dir, "model.pth") torch.save(model.cpu().state_dict(), path) if __name__ == "__main__": parser = argparse.ArgumentParser() # 模型训练参数 parser.add_argument( "--batch-size", type=int, default=64, metavar="N", help="input batch size for training (default: 64)", ) parser.add_argument( "--test-batch-size", type=int, default=1000, metavar="N", help="input batch size for testing (default: 1000)", ) parser.add_argument( "--epochs", type=int, default=10, metavar="N", help="number of epochs to train (default: 10)", ) parser.add_argument( "--lr", type=float, default=0.01, metavar="LR", help="learning rate (default: 0.01)" ) parser.add_argument( "--momentum", type=float, default=0.5, metavar="M", help="SGD momentum (default: 0.5)" ) parser.add_argument("--seed", type=int, default=1, metavar="S", help="random seed (default: 1)") parser.add_argument( "--log-interval", type=int, default=100, metavar="N", help="how many batches to wait before logging training status", ) parser.add_argument( "--backend", type=str, default=None, help="backend for distributed training (tcp, gloo on cpu and gloo, nccl on gpu)", ) # 与SageMaker相关的环境参数 parser.add_argument("--hosts", type=list, default=json.loads(os.environ["SM_HOSTS"])) parser.add_argument("--current-host", type=str, default=os.environ["SM_CURRENT_HOST"]) parser.add_argument("--model-dir", type=str, default=os.environ["SM_MODEL_DIR"]) parser.add_argument("--data-dir", type=str, default=os.environ["SM_CHANNEL_TRAINING"]) parser.add_argument("--num-gpus", type=int, default=os.environ["SM_NUM_GPUS"]) train(parser.parse_args())
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
但这里,我们还需要通过访问环境变量获取部分有关训练环境的属性:
- SM_HOSTS: 包含所有主机的JSON编码列表;在Pytorch中,该列表长度等于WORLD_SIZE;
- SM_CURRENT_HOST: 当前容器名称;在Pytorch中,该容器序号等于RANK;
- SM_MODEL_DIR: 模型的保存路径;该模型之后将上传至S3;
- SM_NUM_GOUS: 当前容器可用的GPU数;
注: Pytorch分布式训练时,dist.init_process_group(backend, rank, world_size),需要用到WORLD_SIZE、RANK。
若在调用PyTorch Estimator的fit()方法时,使用了名为training的输入通道,则按照以下格式设置 SM_CHANNEL_[channel_name]:
- SM_CHANNEL_TRAINING: 输入通道training中数据的存储路径;
该训练脚本从输入通道training的指定路径下加载数据,使用超参数配置训练,训练模型,并将模型保存至model_dir,以便稍后托管。超参数作为参数传递给脚本,可以使用argparse.ArgumentParser实例进行检索。
在SageMaker中训练
from sagemaker.pytorch import PyTorch
estimator = PyTorch(
entry_point="mnist.py",
role=role,
py_version="py38",
framework_version="1.11.0",
instance_count=2,
instance_type="ml.c5.2xlarge",
hyperparameters={"epochs": 1, "backend": "gloo"},
)
estimator.fit({"training": inputs})
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
sagemaker.pytorch.estimator.PyTorch是sagemaker针对Pytorch开发的Estimator,包含以下主要参数:
-
entry_point: 训练脚本的执行入口;
-
py_version、framework_version: python及pytorch的版本;SageMaker将分配满足该版本要求的计算资源;
-
instance_count、instance_type: 计算资源的数量、类型;
-
hyperparameters: 训练脚本的超参数;
-
image_uri: 若指定,Estimator将使用此Image作为训练和部署的运行环境,而py_version、framework_version将失效;image_uri必须是ECR url或 dockerhub image;
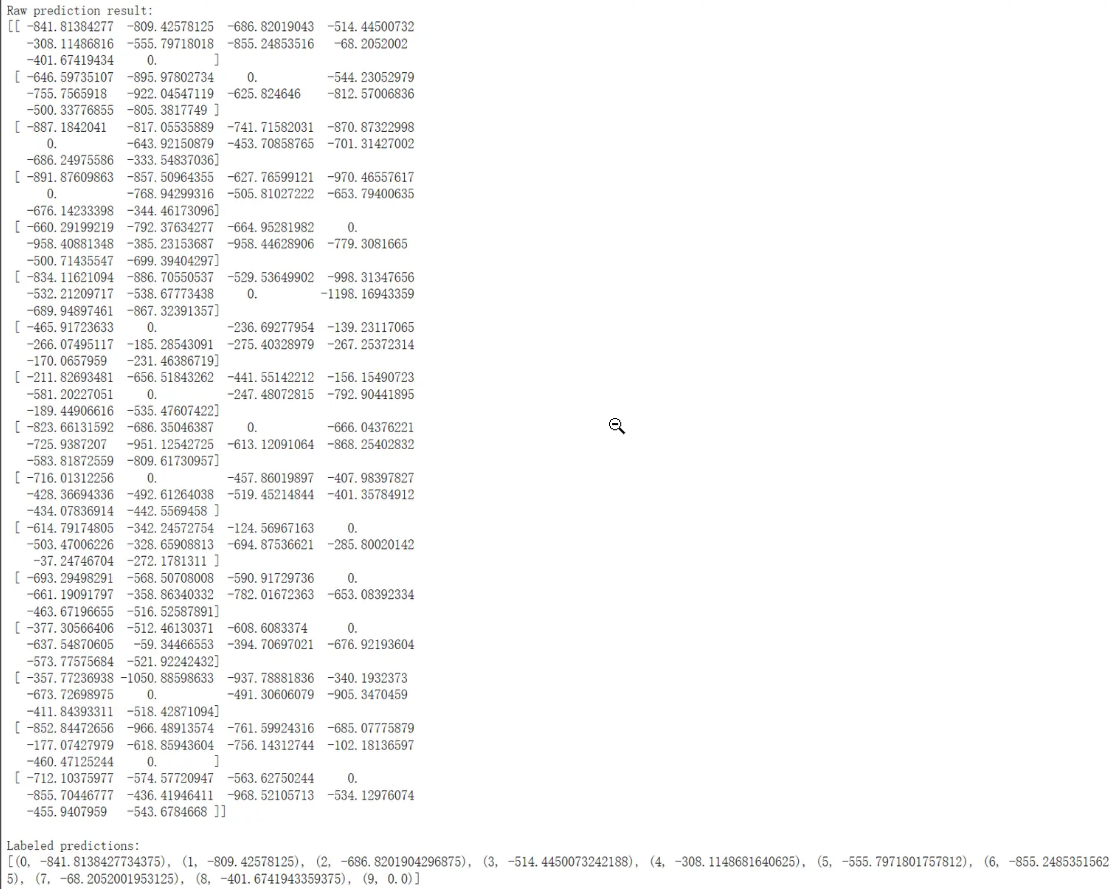
部署并测试该模型
mnist.py中,
model_fn方法需要由我们显式定义出来;而input_fn,predict_fn,output_fn和transform_fm已经默认定义在sagemaker-pytorch-containers中。### 部署该Predictor predictor = estimator.deploy(initial_instance_count=1, instance_type="ml.m4.xlarge") ### 生成测试数据 import gzip import numpy as np import random import os data_dir = "data/MNIST/raw" with gzip.open(os.path.join(data_dir, "t10k-images-idx3-ubyte.gz"), "rb") as f: images = np.frombuffer(f.read(), np.uint8, offset=16).reshape(-1, 28, 28).astype(np.float32) mask = random.sample(range(len(images)), 16) # randomly select some of the test images mask = np.array(mask, dtype=np.int) data = images[mask] ### 测试该Predictor response = predictor.predict(np.expand_dims(data, axis=1)) print("Raw prediction result:") print(response) print() labeled_predictions = list(zip(range(10), response[0])) print("Labeled predictions: ") print(labeled_predictions) print() labeled_predictions.sort(key=lambda label_and_prob: 1.0 - label_and_prob[1]) print("Most likely answer: {}".format(labeled_predictions[0])) ### 删除部署端点并释放资源 sagemaker_session.delete_endpoint(endpoint_name=predictor.endpoint_name)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
3. 使用 Amazon SageMaker Studio 可提高生产率,这是第一个用于机器学习的完全集成式开发环境 (IDE)
Amazon SageMaker Studio 提供了一个基于 Web 的单一视觉界面,您可以在其中执行所有 ML 开发步骤。对于构建、训练和部署模型所需的每个步骤,SageMaker Studio 为您提供了完整的访问、控制权和可见性。您可以快速上传数据、新建笔记本、训练和调试模型、在各个步骤之间来回移动,从而实现在一处调整实验、比较结果,并将模型部署到生产环境中,使您的生产效率大大提高。可以在统一的 SageMaker Studio 可视界面中执行所有的 ML 开发活动,包括笔记本、实验管理、自动模型创建,调试和模型偏差检测。

4. 使用 Amazon SageMaker 笔记本加速构建和协作
通过管理计算实例来查看、运行或共享笔记本非常繁琐。Amazon SageMaker 笔记本提供了一键式 Jupyter 笔记本,使您能够在几秒钟之内立即开始工作。底层的计算资源具有充分的弹性,因此您可以轻松地调高或调低可用资源,并且后台会自动进行更改,而不会中断您的工作。SageMaker 还支持一键分享笔记本。所有代码依赖项都是自动捕获的,因此您可以与他人轻松协作。他们会得到保存在同一位置的完全相同的笔记本。
5. 借助 Amazon SageMaker Autopilot 自动构建、训练和调试完全可视和可控的模型
Amazon SageMaker Autopilot 是业界首个自动机器学习工具,实现了 ML 模型的完全控制和可见性。典型的自动化机器学习方法无法让您深入了解用于创建模型的数据或模型创建背后的逻辑。因此,即使是普通的模型,也无法使之进化。另外,由于典型的自动化 ML 解决方案只能提供一个模型供选择,因此您无法灵活地权衡,例如牺牲一些准确性实现较低延迟的预测。
SageMaker Autopilot 会自动检查原始数据、应用特色处理器、选择最佳算法集、训练和调试多个模型、跟踪其性能,并在随后根据性能对模型进行排名,所有这些仅需几次单击。其结果是,部署性能最佳的模型所花费的时间只有该模型通常所需训练时间的几分之一。模型的创建方式以及内容对您完全可见,并且 SageMaker Autopilot 与 Amazon SageMaker Studio 相集成。在 SageMaker Studio 中,您可以了解多达 50 种由 SageMaker Autopilot 生成的不同模型,轻松地为您的用例选择最佳模型。没有机器学习经验的人可以使用 SageMaker Autopilot 轻松生成模型,而经验丰富的开发人员使用它可以快速开发出基础模型,供团队进一步迭代。
6. 使用 Amazon SageMaker Ground Truth 将数据标记成本降低多达 70%
成功的机器学习模型是建立在大量高质量训练数据的基础上的。但是,建立这些模型所需的训练数据的创建过程往往非常昂贵、复杂和耗时。Amazon SageMaker Ground Truth 可帮助您快速构建和管理高度准确的训练数据集。通过 Amazon Mechanical Turk,Ground Truth 提供了对标签机的便捷访问,并为它们提供了预构建工作流和接口,用于执行常见的标记任务。您还可以使用自己的标签机,或通过亚马逊云科技 Marketplace 使用 Amazon 推荐的供应商。此外,Ground Truth 还不断学习人类制作的标签,制作高质量的自动注释,显著降低标记成本。
7. Amazon SageMaker 支持领先的深度学习框架
支持的框架包括:TensorFlow、PyTorch、Apache MXNet、Chainer、Keras、glion、Horovod、Scikit-learn 和 Deep Graph Library。
使用体验
Amazon SageMaker在模型部署方面表现卓越,通过多样的部署选项,包括云端和边缘计算,实现了极大的灵活性。一键式部署简化了流程,使用户能够迅速将模型推送到生产环境。支持多模型部署提高了资源利用率,而实时和离线推理选项满足了不同场景的需求。SageMaker Studio作为集成开发环境提供便捷的模型管理工具,加强了整个部署过程的便捷性。这些特点使SageMaker在机器学习模型部署领域脱颖而出,为用户提供了全方位的灵活、简便、适应各种场景的解决方案。
总结
综合来看,Amazon SageMaker在机器学习生命周期的各个阶段都提供了强大的功能和灵活性。其性能和便捷性得到了用户的一致好评。然而,一些用户也提到了成本方面的考虑,因此在选择时需要权衡各种因素。总体而言,Amazon SageMaker在云端机器学习服务中占据着重要地位,为用户提供了一体化的解决方案,有助于简化和优化机器学习工作流程。


