- 1100天精通Python(可视化篇)——第105天:Pyecharts绘制多种炫酷极坐标系参数说明+代码实战
- 2【Python/网络安全】 Git漏洞之Githack工具基本安装及使用详析
- 3度学习pytorch实战六:ResNet50网络图像分类篇自建花数据集图像分类(5类)超详细代码_resnet50代码
- 4【鸿蒙(HarmonyOS)】UI开发的两种范式:ArkTS、JS(以登录界面开发为例进行对比)_鸿蒙js开发
- 5软路由R4S+iStoreOS如何实现公网远程桌面本地电脑
- 6软件测试-基础面试相关
- 72023年华为认证HCIA云计算题库(H13-511)_华为云计算认证题库
- 8时间序列预测模型实战案例(二)(Holt-Winter)(Python)结合K-折交叉验证进行时间序列预测实现企业级预测精度(包括运行代码以及代码讲解)_holt-winters
- 9一文带你深入浅出Web的自动化测试工具Selenium【建议收藏】
- 10【Python】一文带你掌握数据容器之集合,字典
基于opencv的相机标定C++代码
赞
踩
一、准备
事先需要把标定图片放在images目录下:
calibdata.txt的内容是标定图片的路径+图片文件名称:

希望对大家有帮助!!!(目前我使用的VS是2019版本,opencv4_1_2)。
二、代码
- #include <iostream>
- #include <fstream>
- #include <string>
- #include <opencv2/opencv.hpp>
- #include <opencv2/core/core.hpp>
- #include <opencv2/highgui/highgui.hpp>
- #include <opencv2/imgproc.hpp>
-
- using namespace std;
- using namespace cv;
-
- int main()
- {
- string dir = "E:\\myProgame\\CameraCalibration\\CameraCalibration\\"; // 存储标定图片路径的txt文件所在路径
- ifstream fin(dir + "calibdata.txt"); // 读取标定图片的路径,以输入方式打开文件
- if (!fin)
- {
- cerr << "没有找到文件" << endl;
- return -1;
- }
- ofstream fout(dir + "calibration_result.txt"); // 输出结果保存在此文本文件下,以输出方式打开文件
-
- cout << "1、开始提取角点……" << endl; // points_all_images
- int image_nums = 0; // 有效图片数量统计
- int points_per_row = 9; // 标定版每行的内点数
- int points_per_col = 6; // 标定版每列的内点数
- Size image_size; // 图片尺寸
- Size corner_size(points_per_row, points_per_col); // 标定板每行每列角点个数,共9*6个角点
- vector<Point2f> points_per_image; // 缓存每幅图检测到的角点
- vector<vector<Point2f>> points_all_images; // 保存检测到的所有角点
- string image_file_name; // 声明一个文件名的字符串
- Mat image_raw, image_gray; // 彩色图,灰度图
- while (getline(fin, image_file_name))
- {
- image_raw = imread(image_file_name); // 按照RGB图像读取数据
- cvtColor(image_raw, image_gray, COLOR_BGR2GRAY); // 将BGR图转化为灰度图
- bool success = findChessboardCorners(image_gray, corner_size, points_per_image); // 角点检测
- if (!success)
- {
- cout << "角点提取失败" << endl;
- exit(1); // 非正常执行导致退出程序
- }
- else
- {
- find4QuadCornerSubpix(image_gray, points_per_image, Size(5, 5)); // 亚像素角点,也可使用cornerSubPix()
- points_all_images.push_back(points_per_image); // 保存亚像素角点
- }
- if (image_nums == 0)
- {
- cout << "channels = " << image_raw.channels() << endl; // 图像的通道数
- cout << "image type = " << image_raw.type() << endl; // 数据类型,CV_8UC3
- image_size.width = image_raw.cols; // 图像的宽,对应着列数(x)
- image_size.height = image_raw.rows; // 图像的高,对应着行数(y)
- cout << "image width = " << image_size.width << endl; // 打印图像宽
- cout << "image height = " << image_size.height << endl; // 打印图像高
- }
- image_nums++;
- }
- cout << "image_nums = " << image_nums << endl; // 输出图像数目
-
- cout << "2、开始计算角点3D坐标……" << endl; // points3D_all_images
- Size block_size(10, 10); // 每个小方格实际大小10mm,(w,h)
- vector<Point3f> points3D_per_image; // 初始化角点三维坐标,从左到右,从上到下
- Point3f point3D; // 3D点(x,y,z)
- for (int i = 0; i < corner_size.height; i++) // 第i行---y
- {
- for (int j = 0; j < corner_size.width; j++) // 第j列---x
- {
- point3D = Point3f(block_size.width * j, block_size.height * i, 0);
- points3D_per_image.push_back(point3D);
- }
- }
- vector<vector<Point3f>> points3D_all_images(image_nums, points3D_per_image); // 保存所有图像角点的三维坐标
- int point_counts = corner_size.area(); // 每张图片上角点个数
-
- cout << "3、开始标定相机……" << endl; // calibrateCamera
- Mat cameraMat(3, 3, CV_32FC1, Scalar::all(0)); // 内参矩阵3*3
- Mat distCoeffs(1, 5, CV_32FC1, Scalar::all(0)); // 畸变矩阵1*5,既考虑径向畸变,又考虑切向
- vector<Mat> rotationMat; // 旋转矩阵
- vector<Mat> translationMat; // 平移矩阵
- calibrateCamera(points3D_all_images, points_all_images, image_size, cameraMat, distCoeffs, rotationMat, translationMat, 0); // 标定
-
- cout << "4、开始对标定结果进行评价……" << endl; // projectPoints
- double total_err = 0.0; // 所有图像平均误差总和
- double err = 0.0; // 每幅图像的平均误差
- vector<Point2f> points_reproject; // 重投影点
- fout << "计算每幅图像的标定误差:" << endl;
- for (int i = 0; i < image_nums; i++)
- {
- points_per_image = points_all_images[i]; // 第i张图像提取角点
- points3D_per_image = points3D_all_images[i]; // 第i张图像中角点的3D坐标
- projectPoints(points3D_per_image, rotationMat[i], translationMat[i], cameraMat, distCoeffs, points_reproject); // 重投影
- Mat detect_points_Mat(1, points_per_image.size(), CV_32FC2); // 变为1*S的矩阵,2通道保存提取角点的像素坐标
- Mat points_reproj_Mat(1, points_reproject.size(), CV_32FC2); // 变为1*S的矩阵,2通道保存投影角点的像素坐标
- for (int j = 0; j < points_per_image.size(); j++)
- {
- detect_points_Mat.at<Vec2f>(0, j) = Vec2f(points_per_image[j].x, points_per_image[j].y);
- points_reproj_Mat.at<Vec2f>(0, j) = Vec2f(points_reproject[j].x, points_reproject[j].y);
- }
- err = norm(points_reproj_Mat, detect_points_Mat, NormTypes::NORM_L2); // 计算两者之间的误差
- total_err += err /= point_counts;
- fout << "第" << i + 1 << "幅图像的平均误差为: " << err << "像素" << endl;
- }
- fout << "总体平均误差为: " << total_err / image_nums << "像素" << endl << endl;
-
- cout << "5、将标定结果写入文件……" << endl;
- fout << "相机内参数矩阵:" << endl << cameraMat << endl << endl;
- fout << "相机的畸变系数:" << endl << distCoeffs << endl << endl;
- Mat rotate_Mat = Mat(3, 3, CV_32FC1, Scalar::all(0)); // 保存旋转矩阵
- for (int i = 0; i < image_nums; i++)
- {
- Rodrigues(rotationMat[i], rotate_Mat); // 将旋转向量通过罗德里格斯公式转换为旋转矩阵
- fout << "第" << i + 1 << "幅图像的旋转矩阵为:" << endl << rotate_Mat << endl << endl;
- fout << "第" << i + 1 << "幅图像的平移向量为:" << endl << translationMat[i] << endl << endl;
- }
- fout << endl;
- fout.close();
-
- return 0;
- }

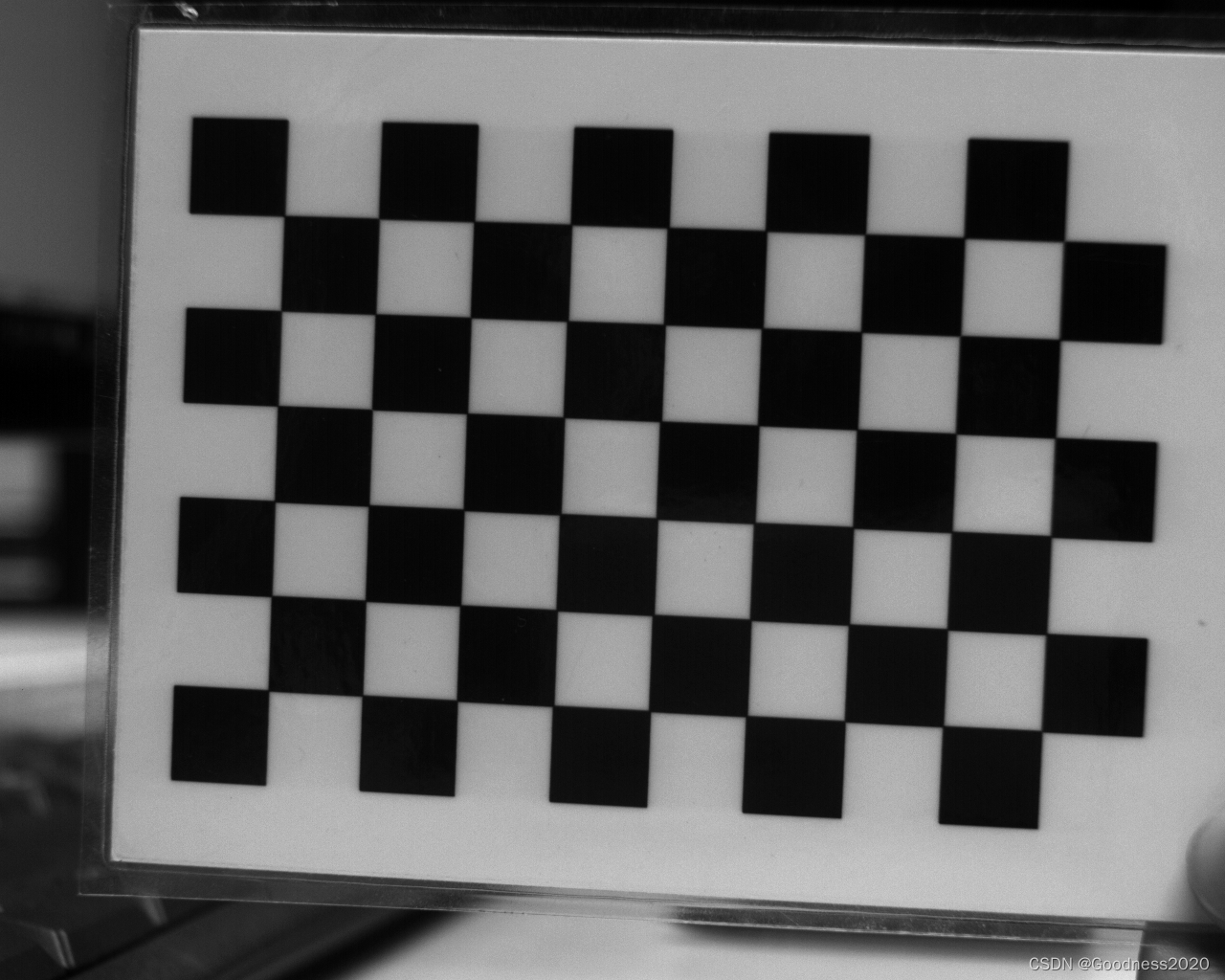
拍摄图像示例
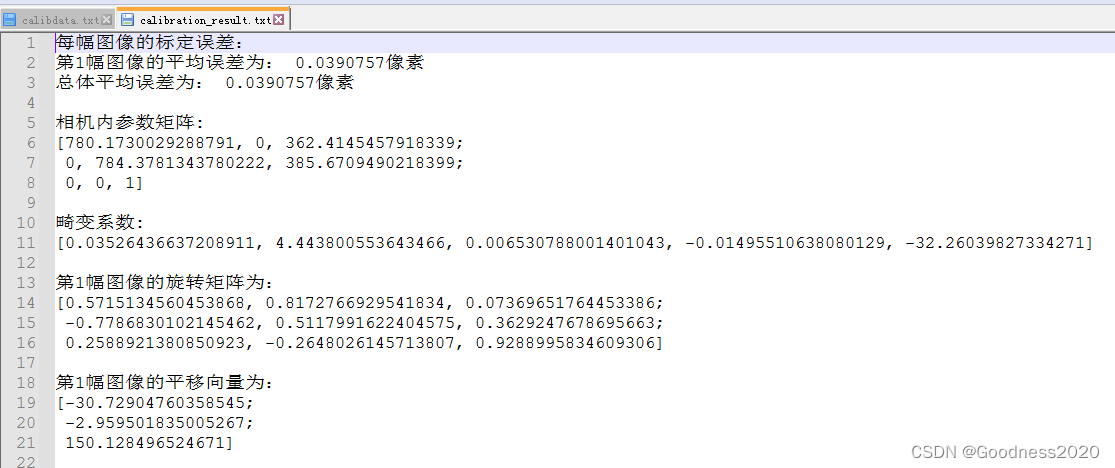
标定结果保存在一个txt文件中:
三、核心函数解析
1、角点检测函数
bool success = findChessboardCorners(image_gray, corner_size, points_per_image);输入:灰度图像image_gray;角点个数大小corner_size,如Size(9,6);
输出:所有角点在图像上的像素坐标points_per_image
2、提取亚像素角点坐标
find4QuadCornerSubpix(image_gray, points_per_image, Size(5, 5)); 输入:灰度图像image_gray;角点像素坐标points_per_image
输出:角点亚像素坐标points_per_image
3、标定相机
calibrateCamera(points3D_all_images, points_all_images, image_size, camera_K, distCoeffs, rotationMat, translationMat, 0); 输入:
* points3D_all_images: 真实三维坐标,格式vector<vector<cv::Point3f>>
* points_all_images: 提取的角点,格式vector<vector<Point2f>>
* image_size: 图像尺寸
输出:
* camera_K : 内参矩阵K,格式Mat(3,3)
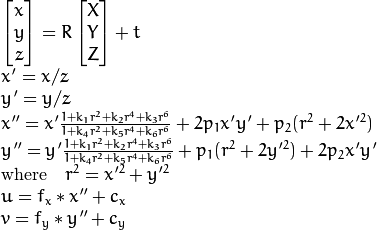
* distCoeffs: 畸变参数,径向畸变k1,k2,切向畸变p1,p2,径向畸变k3,格式Mat(1,5)
* rotationMat: 每个图片的旋转向量,格式vector<Mat>
* translationMat: 每个图片的平移向量,格式vector<Mat>
4、重投影
projectPoints(points3D_per_image, rotationMat[i], translationMat[i], camera_K, distCoeffs, points_reproj);输入:图像中角点的真实世界坐标points3D_per_image,格式vector<Point3f>
输出:重投影后像素点坐标points_reproj,格式vector<Point2f>
重投影公式:
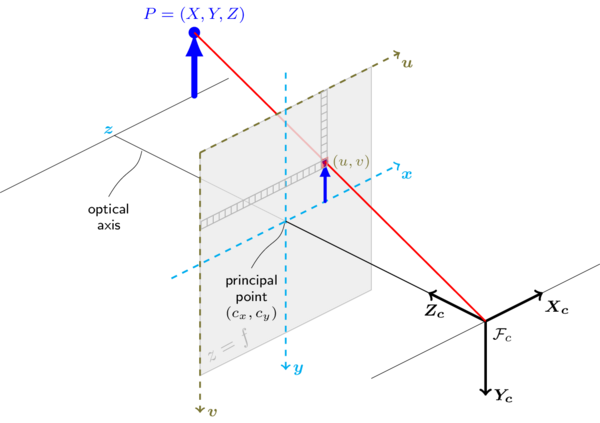
四、标定相机原理
参考:相机标定(六)—— 张正友标定法__归尘_的博客-CSDN博客_张正友标定法
参考:Camera Calibration and 3D Reconstruction — OpenCV 2.4.13.7 documentation